Basic mechanics for dummies. Introduction. Theoretical mechanics for engineers and researchers
Kinematics
Kinematics of a material point
Determination of the speed and acceleration of a point according to the given equations of its motion
Given: Equations of motion of a point: x = 12 sin(πt/6), cm; y= 6 cos 2 (πt/6), cm.
Set the type of its trajectory and for the moment of time t = 1 s find the position of a point on the trajectory, its velocity, full, tangential and normal accelerations, as well as the radius of curvature of the trajectory.
Translational and rotational motion of a rigid body

Given:
t = 2 s; r 1 = 2 cm, R 1 = 4 cm; r 2 = 6 cm, R 2 = 8 cm; r 3 \u003d 12 cm, R 3 \u003d 16 cm; s 5 \u003d t 3 - 6t (cm).
Determine at time t = 2 the velocities of points A, C; angular acceleration of wheel 3; point B acceleration and rack acceleration 4.
Kinematic analysis of a flat mechanism

Given:
R 1 , R 2 , L, AB, ω 1 .
Find: ω 2 .

The flat mechanism consists of rods 1, 2, 3, 4 and slider E. The rods are connected by means of cylindrical hinges. Point D is located in the middle of bar AB.
Given: ω 1 , ε 1 .
Find: speeds V A , V B , V D and V E ; angular velocities ω 2 , ω 3 and ω 4 ; acceleration a B ; angular acceleration ε AB of link AB; positions of instantaneous centers of speeds P 2 and P 3 of links 2 and 3 of the mechanism.
Determining the absolute speed and absolute acceleration of a point

A rectangular plate rotates around a fixed axis according to the law φ = 6 t 2 - 3 t 3. The positive direction of reading the angle φ is shown in the figures by an arc arrow. Rotation axis OO 1 lies in the plane of the plate (the plate rotates in space).
The point M moves along the straight line BD along the plate. The law of its relative motion is given, i.e., the dependence s = AM = 40(t - 2 t 3) - 40(s - in centimeters, t - in seconds). Distance b = 20 cm. In the figure, point M is shown in the position where s = AM > 0 (for s< 0 point M is on the other side of point A).
Find the absolute speed and absolute acceleration of point M at time t 1 = 1 s.
Dynamics
Integration of differential equations of motion of a material point under the action of variable forces
A load D of mass m, having received an initial velocity V 0 at point A, moves in a curved pipe ABC located in a vertical plane. On the section AB, the length of which is l, the load is affected by a constant force T (its direction is shown in the figure) and the force R of the resistance of the medium (the module of this force is R = μV 2, the vector R is directed opposite to the velocity V of the load).
The load, having completed its movement in section AB, at point B of the pipe, without changing the value of its velocity modulus, passes to section BC. On the section BC, a variable force F acts on the load, the projection F x of which on the x axis is given.
Considering the load as a material point, find the law of its motion on the section BC, i.e. x = f(t), where x = BD. Ignore the friction of the load on the pipe.

Download solution
Theorem on the change in the kinetic energy of a mechanical system
The mechanical system consists of weights 1 and 2, a cylindrical roller 3, two-stage pulleys 4 and 5. The bodies of the system are connected by threads wound on pulleys; sections of threads are parallel to the corresponding planes. The roller (solid homogeneous cylinder) rolls along the reference plane without slipping. The radii of the steps of the pulleys 4 and 5 are respectively R 4 = 0.3 m, r 4 = 0.1 m, R 5 = 0.2 m, r 5 = 0.1 m. The mass of each pulley is considered uniformly distributed along its outer rim . The supporting planes of weights 1 and 2 are rough, the coefficient of sliding friction for each weight is f = 0.1.
Under the action of force F, the modulus of which changes according to the law F = F(s), where s is the displacement of the point of its application, the system begins to move from a state of rest. When the system moves, resistance forces act on the pulley 5, the moment of which relative to the axis of rotation is constant and equal to M 5 .
Determine the value of the angular velocity of pulley 4 at the moment when the displacement s of the point of application of force F becomes equal to s 1 = 1.2 m. 
Download solution
Application of the general equation of dynamics to the study of the motion of a mechanical system
For a mechanical system, determine the linear acceleration a 1 . Consider that for blocks and rollers the masses are distributed along the outer radius. Cables and belts are considered weightless and inextensible; there is no slippage. Ignore rolling and sliding friction. 
Download solution
Application of the d'Alembert principle to the determination of the reactions of the supports of a rotating body
The vertical shaft AK, rotating uniformly with an angular velocity ω = 10 s -1 , is fixed with a thrust bearing at point A and a cylindrical bearing at point D.
A weightless rod 1 with a length of l 1 = 0.3 m is rigidly attached to the shaft, at the free end of which there is a load of mass m 1 = 4 kg, and a homogeneous rod 2 with a length of l 2 = 0.6 m, having a mass of m 2 = 8 kg. Both rods lie in the same vertical plane. The points of attachment of the rods to the shaft, as well as the angles α and β are indicated in the table. Dimensions AB=BD=DE=EK=b, where b = 0.4 m. Take the load as a material point.
Neglecting the mass of the shaft, determine the reactions of the thrust bearing and the bearing.

20th ed. - M.: 2010.- 416 p.
The book outlines the fundamentals of the mechanics of a material point, the system of material points and a solid body in a volume corresponding to the programs of technical universities. Many examples and tasks are given, the solutions of which are accompanied by appropriate guidelines. For students of full-time and correspondence technical universities.
Format: pdf
The size: 14 MB
Watch, download: drive.google
TABLE OF CONTENTS
Preface to the thirteenth edition 3
Introduction 5
SECTION ONE STATICS OF A SOLID STATE
Chapter I. Basic concepts initial provisions of articles 9
41. Absolutely rigid body; power. Tasks of statics 9
12. Initial provisions of statics » 11
$ 3. Connections and their reactions 15
Chapter II. Composition of forces. System of converging forces 18
§4. Geometrically! Method of combining forces. Resultant of converging forces, decomposition of forces 18
f 5. Force projections on the axis and on the plane, Analytical method for setting and adding forces 20
16. Equilibrium of the system of converging forces_. . . 23
17. Solving problems of statics. 25
Chapter III. Moment of force about the center. Power couple 31
i 8. Moment of force about the center (or point) 31
| 9. A couple of forces. couple moment 33
f 10*. Equivalence and pair addition theorems 35
Chapter IV. Bringing the system of forces to the center. Equilibrium conditions... 37
f 11. Parallel force transfer theorem 37
112. Bringing the system of forces to a given center - . .38
§ 13. Conditions for the equilibrium of a system of forces. Theorem on the moment of the resultant 40
Chapter V. Flat system of forces 41
§ 14. Algebraic moments of force and couples 41
115. Reduction of a flat system of forces to the simplest form .... 44
§ 16. Equilibrium of a flat system of forces. The case of parallel forces. 46
§ 17. Problem solving 48
118. Balance of systems of bodies 63
§ nineteen*. Statically determined and statically indeterminate systems of bodies (structures) 56"
f 20*. Definition of internal forces. 57
§ 21*. Distributed Forces 58
E22*. Calculation of flat trusses 61
Chapter VI. Friction 64
! 23. Laws of sliding friction 64
: 24. Rough bond reactions. Friction angle 66
: 25. Equilibrium in the presence of friction 66
(26*. Thread friction on a cylindrical surface 69
1 27*. Rolling friction 71
Chapter VII. Spatial system of forces 72
§28. Moment of force about the axis. Principal vector calculation
and the main moment of the system of forces 72
§ 29*. Reduction of the spatial system of forces to the simplest form 77
§thirty. Equilibrium of an arbitrary spatial system of forces. The case of parallel forces
Chapter VIII. Center of gravity 86
§31. Center of Parallel Forces 86
§ 32. Force field. Center of gravity of a rigid body 88
§ 33. Coordinates of the centers of gravity of homogeneous bodies 89
§ 34. Methods for determining the coordinates of the centers of gravity of bodies. 90
§ 35. Centers of gravity of some homogeneous bodies 93
SECTION TWO KINEMATICS OF A POINT AND A RIGID BODY
Chapter IX. Point kinematics 95
§ 36. Introduction to kinematics 95
§ 37. Methods for specifying the movement of a point. . 96
§38. Point velocity vector,. 99
§ 39
§40. Determining the speed and acceleration of a point with the coordinate method of specifying movement 102
§41. Solving problems of point kinematics 103
§ 42. Axes of a natural trihedron. Numerical speed value 107
§ 43. Tangent and normal acceleration of a point 108
§44. Some special cases of motion of a point in software
§45. Graphs of movement, speed and acceleration of point 112
§ 46. Problem solving< 114
§47*. Velocity and acceleration of a point in polar coordinates 116
Chapter X. Translational and rotational motions of a rigid body. . 117
§48. Translational movement 117
§ 49. Rotational motion of a rigid body around an axis. Angular Velocity and Angular Acceleration 119
§50. Uniform and uniform rotation 121
§51. Velocities and accelerations of points of a rotating body 122
Chapter XI. Plane-parallel motion of a rigid body 127
§52. Equations of plane-parallel motion (motion of a plane figure). Decomposition of motion into translational and rotational 127
§53*. Determination of trajectories of points of a plane figure 129
§54. Determining the velocities of points on a plane figure 130
§ 55. The theorem on the projections of the velocities of two points of the body 131
§ 56. Determination of the velocities of points of a plane figure using the instantaneous center of velocities. The concept of centroids 132
§57. Problem solving 136
§58*. Determination of accelerations of points of a plane figure 140
§59*. Instant center of acceleration "*"*
Chapter XII*. Motion of a rigid body around a fixed point and motion of a free rigid body 147
§ 60. Motion of a rigid body having one fixed point. 147
§61. Kinematic Euler equations 149
§62. Speeds and accelerations of body points 150
§ 63. General case of motion of a free rigid body 153
Chapter XIII. Complex point movement 155
§ 64. Relative, figurative and absolute motions 155
§ 65, Velocity addition theorem » 156
§66. The theorem on the addition of accelerations (Coriols' theorem) 160
§67. Problem solving 16*
Chapter XIV*. Complex motion of a rigid body 169
§68. The addition of translational movements 169
§69. Addition of rotations about two parallel axes 169
§70. Cylindrical gears 172
§ 71. Addition of rotations around intersecting axes 174
§72. Addition of translational and rotational movements. Screw movement 176
SECTION THREE DYNAMICS OF A POINT
Chapter XV: Introduction to dynamics. Laws of dynamics 180
§ 73. Basic concepts and definitions 180
§ 74. Laws of dynamics. Problems of the dynamics of a material point 181
§ 75. Systems of units 183
§76. Basic types of forces 184
Chapter XVI. Differential equations of motion of a point. Solving problems of point dynamics 186
§ 77. Differential equations, motions of a material point No. 6
§ 78. Solution of the first problem of dynamics (determination of forces from a given movement) 187
§ 79. Solution of the main problem of dynamics in the rectilinear motion of a point 189
§ 80. Examples of problem solving 191
§81*. Fall of a body in a resisting medium (in air) 196
§82. Solution of the main problem of dynamics, with curvilinear motion of a point 197
Chapter XVII. General theorems of point dynamics 201
§83. The amount of movement of the point. Force Impulse 201
§ S4. Theorem on the change in the momentum of a point 202
§ 85. The theorem on the change in the angular momentum of a point (theorem of moments) "204
§86*. Movement under the action of a central force. Law of areas.. 266
§ 8-7. Force work. Power 208
§88. Work Calculation Examples 210
§89. Theorem on the change in the kinetic energy of a point. ". . . 213J
Chapter XVIII. Non-free and relative motion of a point 219
§90. Non-free movement of a point. 219
§91. Relative movement of a point 223
§ 92. Influence of the Earth's rotation on the balance and motion of bodies... 227
Section 93*. Deviation of the incident point from the vertical due to the rotation of the Earth "230
Chapter XIX. Rectilinear fluctuations of a point. . . 232
§ 94. Free vibrations without taking into account the forces of resistance 232
§ 95. Free oscillations with viscous resistance (damped oscillations) 238
§96. Forced vibrations. Resonance 241
Chapter XX*. Motion of a body in the field of gravity 250
§ 97. Movement of a thrown body in the Earth's gravitational field "250
§98. Artificial satellites of the Earth. Elliptical trajectories. 254
§ 99. The concept of weightlessness. "Local reference systems 257
SECTION FOUR DYNAMICS OF A SYSTEM AND A RIGID BODY
G i a v a XXI. Introduction to system dynamics. moments of inertia. 263
§ 100. Mechanical system. Forces external and internal 263
§ 101. Mass of the system. Center of gravity 264
§ 102. Moment of inertia of a body about an axis. Radius of inertia. . 265
$ 103. Moments of inertia of a body about parallel axes. Huygens' theorem 268
§ 104*. centrifugal moments of inertia. Concepts about the main axes of inertia of the body 269
$105*. Moment of inertia of a body about an arbitrary axis. 271
Chapter XXII. The theorem on the motion of the center of mass of the system 273
$ 106. Differential equations of system motion 273
§ 107. The theorem on the motion of the center of mass 274
$ 108. Law of conservation of motion of the center of mass 276
§ 109. Problem solving 277
Chapter XXIII. Theorem on the change in the quantity of a movable system. . 280
$ BUT. Number of movement system 280
§111. Theorem on change of momentum 281
§ 112. Law of conservation of momentum 282
$113*. Application of the theorem to the motion of a liquid (gas) 284
§ 114*. Body of variable mass. Rocket movement 287
Gdawa XXIV. The theorem on the change in the moment of momentum of the system 290
§ 115. The main moment of the quantities of motion of the system 290
$ 116. Theorem on the change of the main moment of the momentum of the system (theorem of moments) 292
$117. The law of conservation of the main moment of momentum. . 294
$ 118. Problem solving 295
$119*. Application of the moment theorem to the motion of a liquid (gas) 298
§ 120. Equilibrium conditions for a mechanical system 300
Chapter XXV. Theorem on the change in the kinetic energy of the system. . 301.
§ 121. Kinetic energy of the system 301
$122. Some cases of calculating work 305
$ 123. Theorem on the change in the kinetic energy of the system 307
$ 124. Problem solving 310
$125*. Mixed tasks "314
$ 126. Potential force field and force function 317
$127, Potential Energy. Law of conservation of mechanical energy 320
Chapter XXVI. "Application of General Theorems to the Dynamics of a Rigid Body 323
$12&. Rotational motion of a rigid body around a fixed axis ". 323"
$ 129. Physical pendulum. Experimental determination of moments of inertia. 326
$130. Plane-parallel motion of a rigid body 328
$131*. Elementary theory of the gyroscope 334
$132*. Motion of a rigid body around a fixed point and motion of a free rigid body 340
Chapter XXVII. d'Alembert principle 344
$ 133. d'Alembert's principle for a point and a mechanical system. . 344
$ 134. Principal vector and principal moment of inertia forces 346
$ 135. Problem solving 348
$136*, Didemic reactions acting on the axis of a rotating body. Balancing of rotating bodies 352
Chapter XXVIII. The principle of possible displacements and the general equation of dynamics 357
§ 137. Classification of connections 357
§ 138. Possible displacements of the system. Number of degrees of freedom. . 358
§ 139. The principle of possible movements 360
§ 140. Solving problems 362
§ 141. General equation of dynamics 367
Chapter XXIX. Equilibrium conditions and equations of motion of the system in generalized coordinates 369
§ 142. Generalized coordinates and generalized velocities. . . 369
§ 143. Generalized forces 371
§ 144. Equilibrium conditions for a system in generalized coordinates 375
§ 145. Lagrange's equations 376
§ 146. Solving problems 379
Chapter XXX*. Small oscillations of the system around the position of stable equilibrium 387
§ 147. The concept of equilibrium stability 387
§ 148. Small free vibrations of a system with one degree of freedom 389
§ 149. Small damped and forced oscillations of a system with one degree of freedom 392
§ 150. Small summary oscillations of a system with two degrees of freedom 394
Chapter XXXI. Elementary Impact Theory 396
§ 151. Basic equation of the theory of impact 396
§ 152. General theorems of the theory of impact 397
§ 153. Impact recovery factor 399
§ 154. Impact of the body on a fixed barrier 400
§ 155. Direct central impact of two bodies (impact of balls) 401
§ 156. Loss of kinetic energy during an inelastic impact of two bodies. Carnot's theorem 403
§ 157*. A blow to a rotating body. Impact Center 405
Index 409
General theorems of the dynamics of a system of bodies. Theorems on the motion of the center of mass, on the change in the momentum, on the change in the main moment of the momentum, on the change in kinetic energy. Principles of d'Alembert, and possible displacements. General equation of dynamics. Lagrange's equations.
ContentThe work done by the force, is equal to the scalar product of the force vectors and the infinitesimal displacement of the point of its application :
,
that is, the product of the modules of the vectors F and ds and the cosine of the angle between them.
The work done by the moment of force, is equal to the scalar product of the vectors of the moment and the infinitesimal angle of rotation :
.
d'Alembert principle
The essence of d'Alembert's principle is to reduce the problems of dynamics to the problems of statics. To do this, it is assumed (or it is known in advance) that the bodies of the system have certain (angular) accelerations. Next, the forces of inertia and (or) moments of inertia forces are introduced, which are equal in magnitude and reciprocal in direction to the forces and moments of forces, which, according to the laws of mechanics, would create given accelerations or angular accelerations
Consider an example. The body makes a translational motion and external forces act on it. Further, we assume that these forces create an acceleration of the center of mass of the system . According to the theorem on the movement of the center of mass, the center of mass of a body would have the same acceleration if a force acted on the body. Next, we introduce the force of inertia:
.
After that, the task of dynamics is:
.
;
.
For rotational movement proceed in a similar way. Let the body rotate around the z axis and external moments of forces M e zk act on it. We assume that these moments create an angular acceleration ε z . Next, we introduce the moment of inertia forces M И = - J z ε z . After that, the task of dynamics is:
.
Turns into a static task:
;
.
The principle of possible movements
The principle of possible displacements is used to solve problems of statics. In some problems, it gives a shorter solution than writing equilibrium equations. This is especially true for systems with connections (for example, systems of bodies connected by threads and blocks), consisting of many bodies
The principle of possible movements.
For the equilibrium of a mechanical system with ideal constraints, it is necessary and sufficient that the sum of the elementary works of all active forces acting on it for any possible displacement of the system be equal to zero.
Possible system relocation- this is a small displacement, at which the connections imposed on the system are not broken.
Perfect Connections- these are bonds that do not do work when the system is moved. More precisely, the sum of work performed by the links themselves when moving the system is zero.
General equation of dynamics (d'Alembert - Lagrange principle)
The d'Alembert-Lagrange principle is a combination of the d'Alembert principle with the principle of possible displacements. That is, when solving the problem of dynamics, we introduce the forces of inertia and reduce the problem to the problem of statics, which we solve using the principle of possible displacements.
d'Alembert-Lagrange principle.
When a mechanical system moves with ideal constraints at each moment of time, the sum of elementary works of all applied active forces and all inertia forces on any possible displacement of the system is equal to zero:
.
This equation is called general equation of dynamics.
Lagrange equations
Generalized coordinates q 1 , q 2 , ..., q n is a set of n values that uniquely determine the position of the system.
The number of generalized coordinates n coincides with the number of degrees of freedom of the system.
Generalized speeds are the derivatives of the generalized coordinates with respect to time t.
Generalized forces Q 1 , Q 2 , ..., Q n
.
Consider a possible displacement of the system, in which the coordinate q k will receive a displacement δq k . The rest of the coordinates remain unchanged. Let δA k be the work done by external forces during such a displacement. Then
δA k = Q k δq k , or
.
If, with a possible displacement of the system, all coordinates change, then the work done by external forces during such a displacement has the form:
δA = Q 1 δq 1 + Q 2 δq 2 + ... + Q n δq n.
Then the generalized forces are partial derivatives of the displacement work:
.
For potential forces with potential Π,
.
Lagrange equations are the equations of motion of a mechanical system in generalized coordinates:
Here T is the kinetic energy. It is a function of generalized coordinates, velocities, and possibly time. Therefore, its partial derivative is also a function of generalized coordinates, velocities, and time. Next, you need to take into account that the coordinates and velocities are functions of time. Therefore, to find the total time derivative, you need to apply the rule of differentiation of a complex function:
.
References:
S. M. Targ, Short Course in Theoretical Mechanics, Higher School, 2010.
Under the state of equilibrium, in statics, is understood the state in which all parts of the mechanical system are at rest relative to some inertial coordinate system. One of the basic objects of statics are forces and points of their application.
The force acting on a material point with a radius vector from other points is a measure of the influence of other points on the considered point, as a result of which it receives acceleration relative to the inertial reference frame. Value strength is determined by the formula:
,
where m is the mass of the point - a value that depends on the properties of the point itself. This formula is called Newton's second law.
Application of statics in dynamics
An important feature of the equations of motion of an absolutely rigid body is that forces can be converted into equivalent systems. With such a transformation, the equations of motion retain their form, but the system of forces acting on the body can be transformed into a simpler system. Thus, the point of application of force can be moved along the line of its action; forces can be expanded according to the parallelogram rule; forces applied at one point can be replaced by their geometric sum.
An example of such transformations is gravity. It acts on all points of a rigid body. But the law of motion of the body will not change if the force of gravity distributed over all points is replaced by a single vector applied at the center of mass of the body.
It turns out that if we add an equivalent system to the main system of forces acting on the body, in which the directions of the forces are reversed, then the body, under the action of these systems, will be in equilibrium. Thus, the task of determining equivalent systems of forces is reduced to the problem of equilibrium, that is, to the problem of statics.
The main task of statics is the establishment of laws for the transformation of a system of forces into equivalent systems. Thus, the methods of statics are used not only in the study of bodies in equilibrium, but also in the dynamics of a rigid body, in the transformation of forces into simpler equivalent systems.
Material point statics
Consider a material point that is in equilibrium. And let n forces act on it, k = 1, 2, ..., n.
If the material point is in equilibrium, then the vector sum of the forces acting on it is equal to zero:
(1)
.
In equilibrium, the geometric sum of the forces acting on a point is zero.
Geometric interpretation. If the beginning of the second vector is placed at the end of the first vector, and the beginning of the third is placed at the end of the second vector, and then this process is continued, then the end of the last, nth vector will be combined with the beginning of the first vector. That is, we get a closed geometric figure, the lengths of the sides of which are equal to the modules of the vectors. If all vectors lie in the same plane, then we get a closed polygon.
It is often convenient to choose rectangular coordinate system Oxyz. Then the sums of the projections of all force vectors on the coordinate axes are equal to zero:
If you choose any direction defined by some vector , then the sum of the projections of the force vectors on this direction is equal to zero:
.
We multiply equation (1) scalarly by the vector:
.
Here is the scalar product of the vectors and .
Note that the projection of a vector onto the direction of the vector is determined by the formula:
.
Rigid body statics
Moment of force about a point
Determining the moment of force
Moment of force, applied to the body at point A, relative to the fixed center O, is called a vector equal to the vector product of the vectors and:(2) .
Geometric interpretation

The moment of force is equal to the product of the force F and the arm OH.
Let the vectors and be located in the plane of the figure. According to the property of the cross product, the vector is perpendicular to the vectors and , that is, perpendicular to the plane of the figure. Its direction is determined by the right screw rule. In the figure, the moment vector is directed towards us. The absolute value of the moment:
.
Because , then
(3)
.
Using geometry, one can give another interpretation of the moment of force. To do this, draw a straight line AH through the force vector . From the center O we drop the perpendicular OH to this line. The length of this perpendicular is called shoulder of strength. Then
(4)
.
Since , formulas (3) and (4) are equivalent.
In this way, absolute value of the moment of force relative to the center O is product of force on the shoulder this force relative to the chosen center O .
When calculating moment, it is often convenient to decompose the force into two components:
,
where . The force passes through the point O. Therefore, its momentum is zero. Then
.
The absolute value of the moment:
.
Moment components in rectangular coordinates
If we choose a rectangular coordinate system Oxyz centered at the point O, then the moment of force will have the following components:
(5.1)
;
(5.2)
;
(5.3)
.
Here are the coordinates of point A in the selected coordinate system:
.
The components are the values of the moment of force about the axes, respectively.
Properties of the moment of force about the center
The moment about the center O, from the force passing through this center, is equal to zero.
If the point of application of the force is moved along a line passing through the force vector, then the moment, during such a movement, will not change.
The moment from the vector sum of forces applied to one point of the body is equal to the vector sum of the moments from each of the forces applied to the same point:
.
The same applies to forces whose extension lines intersect at one point.
If the vector sum of the forces is zero:
,
then the sum of the moments from these forces does not depend on the position of the center, relative to which the moments are calculated:
.
Power couple
Power couple- these are two forces equal in absolute value and having opposite directions, applied to different points of the body.
A pair of forces is characterized by the moment they create. Since the vector sum of the forces included in the pair is zero, the moment created by the couple does not depend on the point relative to which the moment is calculated. From the point of view of static equilibrium, the nature of the forces in the pair is irrelevant. A pair of forces is used to indicate that a moment of forces acts on the body, having a certain value.
Moment of force about a given axis
Often there are cases when we do not need to know all the components of the moment of force about a selected point, but only need to know the moment of force about a selected axis.
The moment of force about the axis passing through the point O is the projection of the vector of the moment of force, about the point O, on the direction of the axis.
Properties of the moment of force about the axis
The moment about the axis from the force passing through this axis is equal to zero.
The moment about an axis from a force parallel to this axis is zero.
Calculation of the moment of force about an axis

Let a force act on the body at point A. Let us find the moment of this force relative to the O′O′′ axis.
Let's build a rectangular coordinate system. Let the Oz axis coincide with O′O′′ . From the point A we drop the perpendicular OH to O′O′′ . Through the points O and A we draw the axis Ox. We draw the axis Oy perpendicular to Ox and Oz. We decompose the force into components along the axes of the coordinate system:
.
The force crosses the O′O′′ axis. Therefore, its momentum is zero. The force is parallel to the O′O′′ axis. Therefore, its moment is also zero. By formula (5.3) we find:
.
Note that the component is directed tangentially to the circle whose center is the point O . The direction of the vector is determined by the right screw rule.
Equilibrium conditions for a rigid body
In equilibrium, the vector sum of all forces acting on the body is equal to zero and the vector sum of the moments of these forces relative to an arbitrary fixed center is equal to zero:
(6.1)
;
(6.2)
.
We emphasize that the center O , relative to which the moments of forces are calculated, can be chosen arbitrarily. Point O can either belong to the body or be outside it. Usually the center O is chosen to make the calculations easier.
The equilibrium conditions can be formulated in another way.
In equilibrium, the sum of the projections of forces on any direction given by an arbitrary vector is equal to zero:
.
The sum of moments of forces about an arbitrary axis O′O′′ is also equal to zero:
.
Sometimes these conditions are more convenient. There are times when, by choosing axes, calculations can be made simpler.
Center of gravity of the body
Consider one of the most important forces - gravity. Here, the forces are not applied at certain points of the body, but are continuously distributed over its volume. For each part of the body with an infinitesimal volume ∆V, the gravitational force acts. Here ρ is the density of the substance of the body, is the acceleration of free fall.
Let be the mass of an infinitely small part of the body. And let the point A k defines the position of this section. Let us find the quantities related to the force of gravity, which are included in the equilibrium equations (6).
Let's find the sum of gravity forces formed by all parts of the body:
,
where is the mass of the body. Thus, the sum of the gravity forces of individual infinitesimal parts of the body can be replaced by one gravity vector of the entire body:
.
Let's find the sum of the moments of the forces of gravity, relative to the chosen center O in an arbitrary way:
.
Here we have introduced point C which is called center of gravity body. The position of the center of gravity, in a coordinate system centered at the point O, is determined by the formula:
(7)
.
So, when determining static equilibrium, the sum of the gravity forces of individual sections of the body can be replaced by the resultant
,
applied to the center of mass of the body C , whose position is determined by formula (7).
The position of the center of gravity for various geometric shapes can be found in the relevant reference books. If the body has an axis or plane of symmetry, then the center of gravity is located on this axis or plane. So, the centers of gravity of a sphere, circle or circle are located in the centers of the circles of these figures. The centers of gravity of a rectangular parallelepiped, rectangle or square are also located in their centers - at the points of intersection of the diagonals.

Uniformly (A) and linearly (B) distributed load.
There are also cases similar to the force of gravity, when the forces are not applied at certain points of the body, but are continuously distributed over its surface or volume. Such forces are called distributed forces or .
(Figure A). Also, as in the case of gravity, it can be replaced by the resultant force of magnitude , applied at the center of gravity of the diagram. Since the diagram in figure A is a rectangle, the center of gravity of the diagram is in its center - point C: | AC | = | CB |. (picture B). It can also be replaced by the resultant. The value of the resultant is equal to the area of the diagram:.
The point of application is in the center of gravity of the plot. The center of gravity of a triangle, height h, is at a distance from the base. So .
Friction forces
Sliding friction. Let the body be on a flat surface. And let be a force perpendicular to the surface with which the surface acts on the body (pressure force). Then the sliding friction force is parallel to the surface and directed to the side, preventing the body from moving. Its largest value is:
,
where f is the coefficient of friction. The coefficient of friction is a dimensionless quantity.
rolling friction. Let the rounded body roll or may roll on the surface. And let be the pressure force perpendicular to the surface with which the surface acts on the body. Then on the body, at the point of contact with the surface, the moment of friction forces acts, which prevents the movement of the body. The largest value of the friction moment is:
,
where δ is the coefficient of rolling friction. It has the dimension of length.
References:
S. M. Targ, Short Course in Theoretical Mechanics, Higher School, 2010.
As part of any curriculum, the study of physics begins with mechanics. Not from theoretical, not from applied and not computational, but from good old classical mechanics. This mechanics is also called Newtonian mechanics. According to legend, the scientist was walking in the garden, saw an apple fall, and it was this phenomenon that prompted him to discover the law of universal gravitation. Of course, the law has always existed, and Newton only gave it a form understandable to people, but his merit is priceless. In this article, we will not describe the laws of Newtonian mechanics in as much detail as possible, but we will outline the basics, basic knowledge, definitions and formulas that can always play into your hands.
Mechanics is a branch of physics, a science that studies the movement of material bodies and the interactions between them.
The word itself is of Greek origin and translates as "the art of building machines". But before building machines, we still have a long way to go, so let's follow in the footsteps of our ancestors, and we will study the movement of stones thrown at an angle to the horizon, and apples falling on heads from a height h.

Why does the study of physics begin with mechanics? Because it is completely natural, not to start it from thermodynamic equilibrium?!
Mechanics is one of the oldest sciences, and historically the study of physics began precisely with the foundations of mechanics. Placed within the framework of time and space, people, in fact, could not start from something else, no matter how much they wanted to. Moving bodies are the first thing we pay attention to.
What is movement?
Mechanical motion is a change in the position of bodies in space relative to each other over time.
It is after this definition that we quite naturally come to the concept of a frame of reference. Changing the position of bodies in space relative to each other. Key words here: relative to each other . After all, a passenger in a car moves relative to a person standing on the side of the road at a certain speed, and rests relative to his neighbor in a seat nearby, and moves at some other speed relative to a passenger in a car that overtakes them.

That is why, in order to normally measure the parameters of moving objects and not get confused, we need reference system - rigidly interconnected reference body, coordinate system and clock. For example, the earth moves around the sun in a heliocentric frame of reference. In everyday life, we carry out almost all our measurements in a geocentric reference system associated with the Earth. The earth is a reference body relative to which cars, planes, people, animals move.

Mechanics, as a science, has its own task. The task of mechanics is to know the position of the body in space at any time. In other words, mechanics constructs a mathematical description of motion and finds connections between the physical quantities that characterize it.
In order to move further, we need the notion of “ material point ". They say that physics is an exact science, but physicists know how many approximations and assumptions have to be made in order to agree on this very accuracy. No one has ever seen a material point or sniffed an ideal gas, but they do exist! They are just much easier to live with.
A material point is a body whose size and shape can be neglected in the context of this problem.
Sections of classical mechanics
Mechanics consists of several sections
- Kinematics
- Dynamics
- Statics
Kinematics from a physical point of view, studies exactly how the body moves. In other words, this section deals with the quantitative characteristics of movement. Find speed, path - typical tasks of kinematics
Dynamics solves the question of why it moves the way it does. That is, it considers the forces acting on the body.
Statics studies the equilibrium of bodies under the action of forces, that is, it answers the question: why does it not fall at all?
Limits of applicability of classical mechanics
Classical mechanics no longer claims to be a science that explains everything (at the beginning of the last century, everything was completely different), and has a clear scope of applicability. In general, the laws of classical mechanics are valid for the world familiar to us in terms of size (macroworld). They cease to work in the case of the world of particles, when classical mechanics is replaced by quantum mechanics. Also, classical mechanics is inapplicable to cases where the movement of bodies occurs at a speed close to the speed of light. In such cases, relativistic effects become pronounced. Roughly speaking, within the framework of quantum and relativistic mechanics - classical mechanics, this is a special case when the dimensions of the body are large and the speed is small.

Generally speaking, quantum and relativistic effects never go away; they also take place during the usual motion of macroscopic bodies at a speed much lower than the speed of light. Another thing is that the action of these effects is so small that it does not go beyond the most accurate measurements. Classical mechanics will thus never lose its fundamental importance.
We will continue to study the physical foundations of mechanics in future articles. For a better understanding of the mechanics, you can always refer to our authors, which individually shed light on the dark spot of the most difficult task.
 UCBrowser for PC is a worthy competitor for Google Chrome or not Uc browser fast mode
UCBrowser for PC is a worthy competitor for Google Chrome or not Uc browser fast mode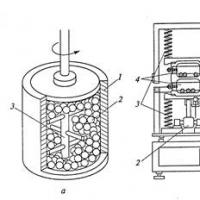 Basic technologies for obtaining nanomaterials
Basic technologies for obtaining nanomaterials How to tell the time in English?
How to tell the time in English? Presentation of the analytical report of the history teacher Participation in expert commissions
Presentation of the analytical report of the history teacher Participation in expert commissions Presentation of the analytical report of the history teacher
Presentation of the analytical report of the history teacher Presentation on the topic "atherosclerosis"
Presentation on the topic "atherosclerosis" History of number systems
History of number systems