Theoretical mechanics for engineers and researchers. Dynamics of the system tel. Basic theorems and concepts Technical mechanics of dynamics
The course covers: kinematics of a point and a rigid body (and from different points of view it is proposed to consider the problem of orientation of a rigid body), classical problems of the dynamics of mechanical systems and the dynamics of a rigid body, elements of celestial mechanics, motion of systems of variable composition, impact theory, differential equations of analytical dynamics.
The course presents all the traditional sections of theoretical mechanics, but special attention is paid to the most meaningful and valuable for theory and applications sections of dynamics and methods of analytical mechanics; statics is studied as a section of dynamics, and in the section of kinematics, the concepts necessary for the section of dynamics and the mathematical apparatus are introduced in detail.
Informational resources
Gantmakher F.R. Lectures on Analytical Mechanics. - 3rd ed. – M.: Fizmatlit, 2001.
Zhuravlev V.F. Fundamentals of theoretical mechanics. - 2nd ed. - M.: Fizmatlit, 2001; 3rd ed. – M.: Fizmatlit, 2008.
Markeev A.P. Theoretical mechanics. - Moscow - Izhevsk: Research Center "Regular and Chaotic Dynamics", 2007.
Requirements
The course is designed for students who own the apparatus of analytical geometry and linear algebra in the scope of the first-year program of a technical university.
Course program
1. Kinematics of a point
1.1. Problems of kinematics. Cartesian coordinate system. Decomposition of a vector in an orthonormal basis. Radius vector and point coordinates. Point speed and acceleration. Trajectory of movement.
1.2. Natural triangular. Expansion of velocity and acceleration in the axes of a natural trihedron (Huygens' theorem).
1.3. Curvilinear point coordinates, examples: polar, cylindrical and spherical coordinate systems. Velocity components and projections of acceleration on the axes of a curvilinear coordinate system.
2. Methods for specifying the orientation of a rigid body
2.1. Solid. Fixed and body-bound coordinate systems.
2.2. Orthogonal rotation matrices and their properties. Euler's finite turn theorem.
2.3. Active and passive points of view on orthogonal transformation. Addition of turns.
2.4. Finite rotation angles: Euler angles and "airplane" angles. Expression of an orthogonal matrix in terms of finite rotation angles.
3. Spatial motion of a rigid body
3.1. Translational and rotational motion of a rigid body. Angular velocity and angular acceleration.
3.2. Distribution of velocities (Euler's formula) and accelerations (Rivals' formula) of points of a rigid body.
3.3. Kinematic invariants. Kinematic screw. Instant screw axle.
4. Plane-parallel motion
4.1. The concept of plane-parallel motion of the body. Angular velocity and angular acceleration in the case of plane-parallel motion. Instantaneous center of speed.
5. Complex motion of a point and a rigid body
5.1. Fixed and moving coordinate systems. Absolute, relative and figurative movement of a point.
5.2. The theorem on the addition of velocities in the case of a complex motion of a point, relative and figurative velocities of a point. The Coriolis theorem on the addition of accelerations for a complex motion of a point, relative, translational and Coriolis accelerations of a point.
5.3. Absolute, relative and portable angular velocity and angular acceleration of a body.
6. Motion of a rigid body with a fixed point (quaternion presentation)
6.1. The concept of complex and hypercomplex numbers. Algebra of quaternions. Quaternion product. Conjugate and inverse quaternion, norm and modulus.
6.2. Trigonometric representation of the unit quaternion. Quaternion method of specifying body rotation. Euler's finite turn theorem.
6.3. Relationship between quaternion components in different bases. Addition of turns. Rodrigues-Hamilton parameters.
7. Exam work
8. Basic concepts of dynamics.
8.1 Momentum, angular momentum (kinetic moment), kinetic energy.
8.2 Power of forces, work of forces, potential and total energy.
8.3 Center of mass (center of inertia) of the system. The moment of inertia of the system about the axis.
8.4 Moments of inertia about parallel axes; the Huygens–Steiner theorem.
8.5 Tensor and ellipsoid of inertia. Principal axes of inertia. Properties of axial moments of inertia.
8.6 Calculation of the angular momentum and kinetic energy of the body using the inertia tensor.
9. Basic theorems of dynamics in inertial and non-inertial frames of reference.
9.1 Theorem on the change in the momentum of the system in an inertial frame of reference. The theorem on the motion of the center of mass.
9.2 Theorem on the change in the angular momentum of the system in an inertial frame of reference.
9.3 Theorem on the change in the kinetic energy of the system in an inertial frame of reference.
9.4 Potential, gyroscopic and dissipative forces.
9.5 Basic theorems of dynamics in non-inertial frames of reference.
10. Movement of a rigid body with a fixed point by inertia.
10.1 Euler dynamic equations.
10.2 Euler case, first integrals of dynamical equations; permanent rotations.
10.3 Interpretations of Poinsot and Macculag.
10.4 Regular precession in the case of dynamic symmetry of the body.
11. Motion of a heavy rigid body with a fixed point.
11.1 General formulation of the problem of the motion of a heavy rigid body around.
fixed point. Euler dynamic equations and their first integrals.
11.2 Qualitative analysis of the motion of a rigid body in the case of Lagrange.
11.3 Forced regular precession of a dynamically symmetric rigid body.
11.4 The basic formula of gyroscopy.
11.5 The concept of the elementary theory of gyroscopes.
12. Dynamics of a point in the central field.
12.1 Binet's equation.
12.2 Orbit equation. Kepler's laws.
12.3 The scattering problem.
12.4 The problem of two bodies. Equations of motion. Area integral, energy integral, Laplace integral.
13. Dynamics of systems of variable composition.
13.1 Basic concepts and theorems on the change of basic dynamic quantities in systems of variable composition.
13.2 Movement of a material point of variable mass.
13.3 Equations of motion of a body of variable composition.
14. Theory of impulsive movements.
14.1 Basic concepts and axioms of the theory of impulsive movements.
14.2 Theorems about changing the basic dynamic quantities during impulsive motion.
14.3 Impulsive motion of a rigid body.
14.4 Collision of two rigid bodies.
14.5 Carnot's theorems.
15. Control work
Learning Outcomes
As a result of mastering the discipline, the student must:
- Know:
- basic concepts and theorems of mechanics and the methods of studying the motion of mechanical systems arising from them;
- Be able to:
- correctly formulate problems in terms of theoretical mechanics;
- develop mechanical and mathematical models that adequately reflect the main properties of the phenomena under consideration;
- apply the acquired knowledge to solve relevant specific problems;
- Own:
- skills in solving classical problems of theoretical mechanics and mathematics;
- the skills of studying the problems of mechanics and building mechanical and mathematical models that adequately describe a variety of mechanical phenomena;
- skills in the practical use of methods and principles of theoretical mechanics in solving problems: force calculation, determining the kinematic characteristics of bodies with various methods of setting motion, determining the law of motion of material bodies and mechanical systems under the action of forces;
- skills to independently master new information in the process of production and scientific activities, using modern educational and information technologies;
Kinematics
Kinematics of a material point
Determination of the speed and acceleration of a point according to the given equations of its motion
Given: Equations of motion of a point: x = 12 sin(πt/6), cm; y= 6 cos 2 (πt/6), cm.
Set the type of its trajectory and for the moment of time t = 1 s find the position of a point on the trajectory, its velocity, full, tangential and normal accelerations, as well as the radius of curvature of the trajectory.
Translational and rotational motion of a rigid body

Given:
t = 2 s; r 1 = 2 cm, R 1 = 4 cm; r 2 = 6 cm, R 2 = 8 cm; r 3 \u003d 12 cm, R 3 \u003d 16 cm; s 5 \u003d t 3 - 6t (cm).
Determine at time t = 2 the velocities of points A, C; angular acceleration of wheel 3; point B acceleration and rack acceleration 4.
Kinematic analysis of a flat mechanism

Given:
R 1 , R 2 , L, AB, ω 1 .
Find: ω 2 .

The flat mechanism consists of rods 1, 2, 3, 4 and slider E. The rods are connected by means of cylindrical hinges. Point D is located in the middle of bar AB.
Given: ω 1 , ε 1 .
Find: speeds V A , V B , V D and V E ; angular velocities ω 2 , ω 3 and ω 4 ; acceleration a B ; angular acceleration ε AB of link AB; positions of instantaneous centers of speeds P 2 and P 3 of links 2 and 3 of the mechanism.
Determining the absolute speed and absolute acceleration of a point

A rectangular plate rotates around a fixed axis according to the law φ = 6 t 2 - 3 t 3. The positive direction of reading the angle φ is shown in the figures by an arc arrow. Rotation axis OO 1 lies in the plane of the plate (the plate rotates in space).
The point M moves along the straight line BD along the plate. The law of its relative motion is given, i.e., the dependence s = AM = 40(t - 2 t 3) - 40(s - in centimeters, t - in seconds). Distance b = 20 cm. In the figure, point M is shown in the position where s = AM > 0 (for s< 0 point M is on the other side of point A).
Find the absolute speed and absolute acceleration of point M at time t 1 = 1 s.
Dynamics
Integration of differential equations of motion of a material point under the action of variable forces
A load D of mass m, having received an initial velocity V 0 at point A, moves in a curved pipe ABC located in a vertical plane. On the section AB, the length of which is l, the load is affected by a constant force T (its direction is shown in the figure) and the force R of the resistance of the medium (the module of this force is R = μV 2, the vector R is directed opposite to the velocity V of the load).
The load, having completed its movement in section AB, at point B of the pipe, without changing the value of its velocity modulus, passes to section BC. On the section BC, a variable force F acts on the load, the projection F x of which on the x axis is given.
Considering the load as a material point, find the law of its motion on the section BC, i.e. x = f(t), where x = BD. Ignore the friction of the load on the pipe.

Download solution
Theorem on the change in the kinetic energy of a mechanical system
The mechanical system consists of weights 1 and 2, a cylindrical roller 3, two-stage pulleys 4 and 5. The bodies of the system are connected by threads wound on pulleys; sections of threads are parallel to the corresponding planes. The roller (solid homogeneous cylinder) rolls along the reference plane without slipping. The radii of the steps of the pulleys 4 and 5 are respectively R 4 = 0.3 m, r 4 = 0.1 m, R 5 = 0.2 m, r 5 = 0.1 m. The mass of each pulley is considered uniformly distributed along its outer rim . The supporting planes of weights 1 and 2 are rough, the coefficient of sliding friction for each weight is f = 0.1.
Under the action of force F, the modulus of which changes according to the law F = F(s), where s is the displacement of the point of its application, the system begins to move from a state of rest. When the system moves, resistance forces act on the pulley 5, the moment of which relative to the axis of rotation is constant and equal to M 5 .
Determine the value of the angular velocity of pulley 4 at the moment when the displacement s of the point of application of force F becomes equal to s 1 = 1.2 m. 
Download solution
Application of the general equation of dynamics to the study of the motion of a mechanical system
For a mechanical system, determine the linear acceleration a 1 . Consider that for blocks and rollers the masses are distributed along the outer radius. Cables and belts are considered weightless and inextensible; there is no slippage. Ignore rolling and sliding friction. 
Download solution
Application of the d'Alembert principle to the determination of the reactions of the supports of a rotating body
The vertical shaft AK, rotating uniformly with an angular velocity ω = 10 s -1 , is fixed with a thrust bearing at point A and a cylindrical bearing at point D.
A weightless rod 1 with a length of l 1 = 0.3 m is rigidly attached to the shaft, at the free end of which there is a load of mass m 1 = 4 kg, and a homogeneous rod 2 with a length of l 2 = 0.6 m, having a mass of m 2 = 8 kg. Both rods lie in the same vertical plane. The points of attachment of the rods to the shaft, as well as the angles α and β are indicated in the table. Dimensions AB=BD=DE=EK=b, where b = 0.4 m. Take the load as a material point.
Neglecting the mass of the shaft, determine the reactions of the thrust bearing and the bearing.

General theorems of the dynamics of a system of bodies. Theorems on the motion of the center of mass, on the change in the momentum, on the change in the main moment of the momentum, on the change in kinetic energy. Principles of d'Alembert, and possible displacements. General equation of dynamics. Lagrange's equations.
ContentThe work done by the force, is equal to the scalar product of the force vectors and the infinitesimal displacement of the point of its application :
,
that is, the product of the modules of the vectors F and ds and the cosine of the angle between them.
The work done by the moment of force, is equal to the scalar product of the vectors of the moment and the infinitesimal angle of rotation :
.
d'Alembert principle
The essence of d'Alembert's principle is to reduce the problems of dynamics to the problems of statics. To do this, it is assumed (or it is known in advance) that the bodies of the system have certain (angular) accelerations. Next, the forces of inertia and (or) moments of inertia forces are introduced, which are equal in magnitude and reciprocal in direction to the forces and moments of forces, which, according to the laws of mechanics, would create given accelerations or angular accelerations
Consider an example. The body makes a translational motion and external forces act on it. Further, we assume that these forces create an acceleration of the center of mass of the system . According to the theorem on the movement of the center of mass, the center of mass of a body would have the same acceleration if a force acted on the body. Next, we introduce the force of inertia:
.
After that, the task of dynamics is:
.
;
.
For rotational movement proceed in a similar way. Let the body rotate around the z axis and external moments of forces M e zk act on it. We assume that these moments create an angular acceleration ε z . Next, we introduce the moment of inertia forces M И = - J z ε z . After that, the task of dynamics is:
.
Turns into a static task:
;
.
The principle of possible movements
The principle of possible displacements is used to solve problems of statics. In some problems, it gives a shorter solution than writing equilibrium equations. This is especially true for systems with connections (for example, systems of bodies connected by threads and blocks), consisting of many bodies
The principle of possible movements.
For the equilibrium of a mechanical system with ideal constraints, it is necessary and sufficient that the sum of the elementary works of all active forces acting on it for any possible displacement of the system be equal to zero.
Possible system relocation- this is a small displacement, at which the connections imposed on the system are not broken.
Perfect Connections- these are bonds that do not do work when the system is moved. More precisely, the sum of work performed by the links themselves when moving the system is zero.
General equation of dynamics (d'Alembert - Lagrange principle)
The d'Alembert-Lagrange principle is a combination of the d'Alembert principle with the principle of possible displacements. That is, when solving the problem of dynamics, we introduce the forces of inertia and reduce the problem to the problem of statics, which we solve using the principle of possible displacements.
d'Alembert-Lagrange principle.
When a mechanical system moves with ideal constraints at each moment of time, the sum of elementary works of all applied active forces and all inertia forces on any possible displacement of the system is equal to zero:
.
This equation is called general equation of dynamics.
Lagrange equations
Generalized coordinates q 1 , q 2 , ..., q n is a set of n values that uniquely determine the position of the system.
The number of generalized coordinates n coincides with the number of degrees of freedom of the system.
Generalized speeds are the derivatives of the generalized coordinates with respect to time t.
Generalized forces Q 1 , Q 2 , ..., Q n
.
Consider a possible displacement of the system, in which the coordinate q k will receive a displacement δq k . The rest of the coordinates remain unchanged. Let δA k be the work done by external forces during such a displacement. Then
δA k = Q k δq k , or
.
If, with a possible displacement of the system, all coordinates change, then the work done by external forces during such a displacement has the form:
δA = Q 1 δq 1 + Q 2 δq 2 + ... + Q n δq n.
Then the generalized forces are partial derivatives of the displacement work:
.
For potential forces with potential Π,
.
Lagrange equations are the equations of motion of a mechanical system in generalized coordinates:
Here T is the kinetic energy. It is a function of generalized coordinates, velocities, and possibly time. Therefore, its partial derivative is also a function of generalized coordinates, velocities, and time. Next, you need to take into account that the coordinates and velocities are functions of time. Therefore, to find the total time derivative, you need to apply the rule of differentiation of a complex function:
.
References:
S. M. Targ, Short Course in Theoretical Mechanics, Higher School, 2010.
As part of any curriculum, the study of physics begins with mechanics. Not from theoretical, not from applied and not computational, but from good old classical mechanics. This mechanics is also called Newtonian mechanics. According to legend, the scientist was walking in the garden, saw an apple fall, and it was this phenomenon that prompted him to discover the law of universal gravitation. Of course, the law has always existed, and Newton only gave it a form understandable to people, but his merit is priceless. In this article, we will not describe the laws of Newtonian mechanics in as much detail as possible, but we will outline the basics, basic knowledge, definitions and formulas that can always play into your hands.
Mechanics is a branch of physics, a science that studies the movement of material bodies and the interactions between them.
The word itself is of Greek origin and translates as "the art of building machines". But before building machines, we still have a long way to go, so let's follow in the footsteps of our ancestors, and we will study the movement of stones thrown at an angle to the horizon, and apples falling on heads from a height h.

Why does the study of physics begin with mechanics? Because it is completely natural, not to start it from thermodynamic equilibrium?!
Mechanics is one of the oldest sciences, and historically the study of physics began precisely with the foundations of mechanics. Placed within the framework of time and space, people, in fact, could not start from something else, no matter how much they wanted to. Moving bodies are the first thing we pay attention to.
What is movement?
Mechanical motion is a change in the position of bodies in space relative to each other over time.
It is after this definition that we quite naturally come to the concept of a frame of reference. Changing the position of bodies in space relative to each other. Key words here: relative to each other . After all, a passenger in a car moves relative to a person standing on the side of the road at a certain speed, and rests relative to his neighbor in a seat nearby, and moves at some other speed relative to a passenger in a car that overtakes them.

That is why, in order to normally measure the parameters of moving objects and not get confused, we need reference system - rigidly interconnected reference body, coordinate system and clock. For example, the earth moves around the sun in a heliocentric frame of reference. In everyday life, we carry out almost all our measurements in a geocentric reference system associated with the Earth. The earth is a reference body relative to which cars, planes, people, animals move.

Mechanics, as a science, has its own task. The task of mechanics is to know the position of the body in space at any time. In other words, mechanics constructs a mathematical description of motion and finds connections between the physical quantities that characterize it.
In order to move further, we need the notion of “ material point ". They say that physics is an exact science, but physicists know how many approximations and assumptions have to be made in order to agree on this very accuracy. No one has ever seen a material point or sniffed an ideal gas, but they do exist! They are just much easier to live with.
A material point is a body whose size and shape can be neglected in the context of this problem.
Sections of classical mechanics
Mechanics consists of several sections
- Kinematics
- Dynamics
- Statics
Kinematics from a physical point of view, studies exactly how the body moves. In other words, this section deals with the quantitative characteristics of movement. Find speed, path - typical tasks of kinematics
Dynamics solves the question of why it moves the way it does. That is, it considers the forces acting on the body.
Statics studies the equilibrium of bodies under the action of forces, that is, it answers the question: why does it not fall at all?
Limits of applicability of classical mechanics
Classical mechanics no longer claims to be a science that explains everything (at the beginning of the last century, everything was completely different), and has a clear scope of applicability. In general, the laws of classical mechanics are valid for the world familiar to us in terms of size (macroworld). They cease to work in the case of the world of particles, when classical mechanics is replaced by quantum mechanics. Also, classical mechanics is inapplicable to cases where the movement of bodies occurs at a speed close to the speed of light. In such cases, relativistic effects become pronounced. Roughly speaking, within the framework of quantum and relativistic mechanics - classical mechanics, this is a special case when the dimensions of the body are large and the speed is small.

Generally speaking, quantum and relativistic effects never go away; they also take place during the usual motion of macroscopic bodies at a speed much lower than the speed of light. Another thing is that the action of these effects is so small that it does not go beyond the most accurate measurements. Classical mechanics will thus never lose its fundamental importance.
We will continue to study the physical foundations of mechanics in future articles. For a better understanding of the mechanics, you can always refer to our authors, which individually shed light on the dark spot of the most difficult task.
Point kinematics.
1. The subject of theoretical mechanics. Basic abstractions.
Theoretical mechanicsis a science in which the general laws of mechanical motion and mechanical interaction of material bodies are studied
Mechanical movementcalled the movement of a body in relation to another body, occurring in space and time.
Mechanical interaction is called such an interaction of material bodies, which changes the nature of their mechanical movement.
Statics - This is a branch of theoretical mechanics, which studies methods for converting systems of forces into equivalent systems and establishes the conditions for the equilibrium of forces applied to a solid body.
Kinematics - is the branch of theoretical mechanics that deals with the movement of material bodies in space from a geometric point of view, regardless of the forces acting on them.
Dynamics - This is a branch of mechanics that studies the movement of material bodies in space, depending on the forces acting on them.
Objects of study in theoretical mechanics:
material point,
system of material points,
Absolutely rigid body.
Absolute space and absolute time are independent of each other. Absolute space - three-dimensional, homogeneous, motionless Euclidean space. Absolute time - flows from the past to the future continuously, it is homogeneous, the same at all points in space and does not depend on the movement of matter.
2. The subject of kinematics.
Kinematics - this is a branch of mechanics that studies the geometric properties of the motion of bodies without taking into account their inertia (i.e. mass) and the forces acting on them
To determine the position of a moving body (or point) with the body in relation to which the movement of this body is being studied, rigidly, some coordinate system is connected, which together with the body forms reference system.
The main task of kinematics is to, knowing the law of motion of a given body (point), to determine all the kinematic quantities that characterize its motion (velocity and acceleration).
3. Methods for specifying the movement of a point
· natural way
Should be known:
Point movement trajectory;
Start and direction of counting;
The law of motion of a point along a given trajectory in the form (1.1)
· Coordinate method
Equations (1.2) are the equations of motion of the point M.
The equation for the trajectory of point M can be obtained by eliminating the time parameter « t » from equations (1.2)
· Vector way
|
|
(1.3) Relationship between coordinate and vector methods for specifying the movement of a point
|

Connection between coordinate and natural ways of specifying the movement of a point
Determine the trajectory of the point, excluding time from equations (1.2);
-- find the law of motion of a point along a trajectory (use the expression for the arc differential)
After integration, we obtain the law of motion of a point along a given trajectory:
The connection between the coordinate and vector methods of specifying the movement of a point is determined by equation (1.4)
4. Determining the speed of a point with the vector method of specifying the movement.
Let at the momenttthe position of the point is determined by the radius vector , and at the moment of timet 1
– radius-vector , then for a period of time ![]() the point will move.
the point will move.
|
|
point average speed, the direction of the vector is the same as the vector
|

 (1.5)
(1.5)
The speed of a point at a given time
To get the speed of a point at a given moment of time, it is necessary to make a passage to the limit
 (1.6)
(1.6)
(1.7)
The speed vector of a point at a given time is equal to the first derivative of the radius vector with respect to time and is directed tangentially to the trajectory at a given point.
(unit¾ m/s, km/h)
Mean acceleration vector has the same direction as the vectorΔ v , that is, directed towards the concavity of the trajectory.
Acceleration vector of a point at a given time is equal to the first derivative of the velocity vector or the second derivative of the point's radius vector with respect to time.
(unit - )
How is the vector located in relation to the trajectory of the point?
In rectilinear motion, the vector is directed along the straight line along which the point moves. If the trajectory of the point is a flat curve, then the acceleration vector , as well as the vector cp, lies in the plane of this curve and is directed towards its concavity. If the trajectory is not a plane curve, then the vector cp will be directed towards the concavity of the trajectory and will lie in the plane passing through the tangent to the trajectory at the pointM and a line parallel to the tangent at an adjacent pointM 1 . V limit when the pointM 1 tends to M this plane occupies the position of the so-called contiguous plane. Therefore, in the general case, the acceleration vector lies in a contiguous plane and is directed towards the concavity of the curve.
 UCBrowser for PC is a worthy competitor for Google Chrome or not Uc browser fast mode
UCBrowser for PC is a worthy competitor for Google Chrome or not Uc browser fast mode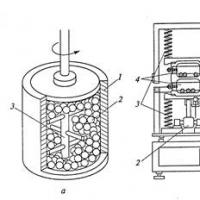 Basic technologies for obtaining nanomaterials
Basic technologies for obtaining nanomaterials How to tell the time in English?
How to tell the time in English? Presentation of the analytical report of the history teacher Participation in expert commissions
Presentation of the analytical report of the history teacher Participation in expert commissions Presentation of the analytical report of the history teacher
Presentation of the analytical report of the history teacher Presentation on the topic "atherosclerosis"
Presentation on the topic "atherosclerosis" History of number systems
History of number systems