Teoretična mehanika za inženirje in raziskovalce. Dinamika sistema tel. Osnovni izreki in pojmi Tehnična mehanika dinamike
Predmet zajema: kinematiko točke in togega telesa (z različnih zornih kotov se predlaga obravnavanje problema orientacije togega telesa), klasične probleme dinamike mehanskih sistemov in dinamike togega telesa, elementi nebesne mehanike, gibanje sistemov spremenljive sestave, teorija udarcev, diferencialne enačbe analitične dinamike.
Predmet predstavlja vse tradicionalne oddelke teoretične mehanike, posebna pozornost pa je namenjena najbolj smiselnim in za teorijo in aplikacijo najbolj dragocenim odsekom dinamike in metod analitične mehanike; statika se proučuje kot del dinamike, v oddelku kinematike pa so podrobno predstavljeni pojmi, ki so potrebni za odsek dinamike in matematični aparat.
Informacijski viri
Gantmakher F.R. Predavanja iz analitične mehanike. - 3. izd. – M.: Fizmatlit, 2001.
Žuravlev V.F. Osnove teoretične mehanike. - 2. izd. - M.: Fizmatlit, 2001; 3. izd. – M.: Fizmatlit, 2008.
Markeev A.P. Teoretična mehanika. - Moskva - Izhevsk: Raziskovalno središče "Redna in kaotična dinamika", 2007.
Zahteve
Predmet je namenjen študentom, ki so lastniki aparature analitične geometrije in linearne algebre v okviru prvega letnika tehniške univerze.
Program tečaja
1. Kinematika točke
1.1. Problemi kinematike. Kartezijev koordinatni sistem. Razgradnja vektorja v ortonormalni bazi. Vektor polmera in koordinate točke. Točkovna hitrost in pospešek. Trajektorija gibanja.
1.2. Naravni trikotni. Razširitev hitrosti in pospeška v osi naravnega triedra (Huygensov izrek).
1.3. Koordinate krivuljnih točk, primeri: polarni, cilindrični in sferični koordinatni sistemi. Komponente hitrosti in projekcije pospeška na osi krivolinijskega koordinatnega sistema.
2. Metode za določanje orientacije togega telesa
2.1. Trdno. Fiksni in na telo vezani koordinatni sistemi.
2.2. Ortogonalne rotacijske matrice in njihove lastnosti. Eulerjev izrek končnih obratov.
2.3. Aktivni in pasivni pogledi na ortogonalno transformacijo. Dodajanje zavojev.
2.4. Končni rotacijski koti: Eulerjevi koti in koti "letala". Izraz ortogonalne matrike v smislu končnih rotacijskih kotov.
3. Prostorsko gibanje togega telesa
3.1. Translacijsko in rotacijsko gibanje togega telesa. Kotna hitrost in kotni pospešek.
3.2. Porazdelitev hitrosti (Eulerjeva formula) in pospeškov (Rivalsova formula) točk togega telesa.
3.3. Kinematične invariante. Kinematični vijak. Instant vijačna os.
4. Ravnovzporedno gibanje
4.1. Koncept ravninsko vzporednega gibanja telesa. Kotna hitrost in kotni pospešek v primeru ravninsko vzporednega gibanja. Takojšnje središče hitrosti.
5. Kompleksno gibanje točke in togega telesa
5.1. Stalni in gibljivi koordinatni sistemi. Absolutno, relativno in figurativno gibanje točke.
5.2. Izrek o seštevanju hitrosti v primeru kompleksnega gibanja točke, relativne in figurativne hitrosti točke. Coriolisov izrek o seštevanju pospeškov za kompleksno gibanje točke, relativnem, translacijskem in Coriolisovem pospešku točke.
5.3. Absolutna, relativna in prenosljiva kotna hitrost in kotni pospešek telesa.
6. Gibanje togega telesa s fiksno točko (kvaternijska predstavitev)
6.1. Koncept kompleksnih in hiperkompleksnih števil. Algebra kvaternijev. Kvaternijski izdelek. Konjugirani in inverzni kvaternion, norma in modul.
6.2. Trigonometrična predstavitev enotnega kvaterniona. Kvaternijska metoda določanja rotacije telesa. Eulerjev izrek končnih obratov.
6.3. Razmerje med komponentami kvaterniona v različnih bazah. Dodajanje zavojev. Rodrigues-Hamiltonovi parametri.
7. Izpitno delo
8. Osnovni pojmi dinamike.
8.1 Moment, kotni moment (kinetični moment), kinetična energija.
8.2 Moč sil, delo sil, potencial in skupna energija.
8.3 Masno središče (vztrajnostno središče) sistema. Vztrajnostni moment sistema okoli osi.
8.4 Vztrajnostni momenti okoli vzporednih osi; Huygens-Steinerjev izrek.
8.5 Tenzor in vztrajnostni elipsoid. Glavne vztrajnostne osi. Lastnosti aksialnih vztrajnostnih momentov.
8.6 Izračun kotne količine in kinetične energije telesa z uporabo vztrajnostnega tenzorja.
9. Osnovni izreki dinamike v inercialnih in neinercialnih referenčnih okvirih.
9.1 Izrek o spremembi gibalne količine sistema v inercialnem referenčnem sistemu. Izrek o gibanju središča mase.
9.2 Izrek o spremembi gibalne količine sistema v inercialnem referenčnem sistemu.
9.3 Izrek o spremembi kinetične energije sistema v inercialnem referenčnem sistemu.
9.4 Potencialne, žiroskopske in disipativne sile.
9.5 Osnovni izreki dinamike v neinercialnih referenčnih okvirih.
10. Gibanje togega telesa s fiksno točko po vztrajnosti.
10.1 Eulerjeve dinamične enačbe.
10.2 Eulerjev primer, prvi integrali dinamičnih enačb; stalne rotacije.
10.3 Interpretacije Poinsota in Macculaga.
10.4 Regularna precesija v primeru dinamične simetrije telesa.
11. Gibanje težkega togega telesa s fiksno točko.
11.1 Splošna formulacija problema gibanja težkega togega telesa okoli.
fiksna točka. Eulerjeve dinamične enačbe in njihovi prvi integrali.
11.2 Kvalitativna analiza gibanja togega telesa v primeru Lagrangea.
11.3 Prisilna pravilna precesija dinamično simetričnega togega telesa.
11.4 Osnovna formula žiroskopije.
11.5 Koncept osnovne teorije žiroskopov.
12. Dinamika točke v osrednjem polju.
12.1 Binetova enačba.
12.2 Orbitna enačba. Keplerjevi zakoni.
12.3 Problem sipanja.
12.4 Problem dveh teles. Enačbe gibanja. Površinski integral, energijski integral, Laplaceov integral.
13. Dinamika sistemov spremenljive sestave.
13.1 Osnovni pojmi in izreki o spremembi osnovnih dinamičnih veličin v sistemih spremenljive sestave.
13.2 Gibanje materialne točke spremenljive mase.
13.3 Enačbe gibanja telesa spremenljive sestave.
14. Teorija impulzivnih gibov.
14.1 Osnovni pojmi in aksiomi teorije impulzivnih gibov.
14.2 Izreki o spreminjanju osnovnih dinamičnih veličin pri impulzivnem gibanju.
14.3 Impulzivno gibanje togega telesa.
14.4 Trk dveh togih teles.
14.5 Carnotovi izreki.
15. Kontrolno delo
Učni izidi
Kot rezultat obvladovanja discipline mora študent:
- vedeti:
- osnovni pojmi in izreke mehanike ter metode preučevanja gibanja mehanskih sistemov, ki iz njih izhajajo;
- Biti sposoben:
- pravilno formulirati probleme v smislu teoretične mehanike;
- razviti mehanske in matematične modele, ki ustrezno odražajo glavne lastnosti obravnavanih pojavov;
- uporabiti pridobljeno znanje za reševanje relevantnih specifičnih problemov;
- Lastno:
- veščine reševanja klasičnih problemov teoretične mehanike in matematike;
- spretnosti proučevanja problemov mehanike in izdelave mehanskih in matematičnih modelov, ki ustrezno opisujejo različne mehanske pojave;
- veščine praktične uporabe metod in načel teoretične mehanike pri reševanju problemov: izračun sile, določanje kinematičnih značilnosti teles z različnimi načini določanja gibanja, določanje zakona gibanja materialnih teles in mehanskih sistemov pod delovanjem sil;
- spretnosti za samostojno obvladovanje novih informacij v procesu produkcije in znanstvenih dejavnosti z uporabo sodobnih izobraževalnih in informacijskih tehnologij;
Kinematika
Kinematika materialne točke
Določanje hitrosti in pospeška točke glede na podane enačbe njenega gibanja
Podano: Enačbe gibanja točke: x = 12 greh (πt/6), cm; y= 6 cos 2 (πt/6), cm.
Nastavite vrsto njegove poti in za trenutek časa t = 1 s najti položaj točke na trajektoriji, njeno hitrost, polni, tangencialni in normalni pospeški ter polmer ukrivljenosti poti.
Translacijsko in rotacijsko gibanje togega telesa

dano:
t = 2 s; r 1 = 2 cm, R 1 = 4 cm; r 2 = 6 cm, R 2 = 8 cm; r 3 = 12 cm, R 3 = 16 cm; s 5 \u003d t 3 - 6t (cm).
Določite v času t = 2 hitrosti točk A, C; kotni pospešek kolesa 3; pospešek točke B in pospešek regala 4.
Kinematična analiza ploščatega mehanizma

dano:
R 1 , R 2 , L, AB, ω 1 .
Poiščite: ω 2 .

Ravni mehanizem je sestavljen iz palic 1, 2, 3, 4 in drsnika E. Palice so povezane s pomočjo cilindričnih tečajev. Točka D se nahaja na sredini palice AB.
Dano: ω 1 , ε 1 .
Poiščite: hitrosti V A , V B , V D in V E ; kotne hitrosti ω 2 , ω 3 in ω 4 ; pospešek a B ; kotni pospešek ε AB povezave AB; položaji trenutnih centrov hitrosti P 2 in P 3 členov 2 in 3 mehanizma.
Določanje absolutne hitrosti in absolutnega pospeška točke

Pravokotna plošča se vrti okoli fiksne osi po zakonu φ = 6 t 2 - 3 t 3. Pozitivna smer odčitavanja kota φ je na slikah prikazana z ločno puščico. Os vrtenja OO 1 leži v ravnini plošče (plošča se vrti v prostoru).
Točka M se premika vzdolž premice BD vzdolž plošče. Podan je zakon njegovega relativnega gibanja, to je odvisnost s = AM = 40 (t - 2 t 3) - 40(s - v centimetrih, t - v sekundah). Razdalja b = 20 cm. Na sliki je točka M prikazana v položaju, kjer je s = AM > 0 (za s< 0 točka M je na drugi strani točke A).
Poiščite absolutno hitrost in absolutni pospešek točke M v času t 1 = 1 s.
Dinamika
Integracija diferencialnih enačb gibanja materialne točke pod delovanjem spremenljivih sil
Tovor D mase m, ki je prejel začetno hitrost V 0 v točki A, se premika v ukrivljeni cevi ABC, ki se nahaja v navpični ravnini. Na odseku AB, katerega dolžina je l, na obremenitev vplivata konstantna sila T (njena smer je prikazana na sliki) in sila R upora medija (modul te sile je R = μV 2 je vektor R usmerjen nasproti hitrosti V bremena).
Obremenitev, ki zaključi svoje gibanje v odseku AB, v točki B cevi, ne da bi spremenila vrednost svojega modula hitrosti, preide na odsek BC. Na odseku BC na obremenitev deluje spremenljiva sila F, katere projekcija F x je podana na os x.
Če upoštevamo obremenitev kot materialno točko, poiščite zakon njenega gibanja na odseku BC, t.j. x = f(t), kjer je x = BD. Ignorirajte trenje obremenitve na cevi.

Prenesite rešitev
Izrek o spremembi kinetične energije mehanskega sistema
Mehanski sistem je sestavljen iz uteži 1 in 2, cilindričnega valja 3, dvostopenjskih škripcev 4 in 5. Tela sistema so povezana z navoji, navitimi na škripce; odseki niti so vzporedni z ustreznimi ravninami. Valj (trden homogen cilinder) se kotali po referenčni ravnini brez zdrsa. Polmeri stopnic škripcev 4 in 5 so R 4 = 0,3 m, r 4 = 0,1 m, R 5 = 0,2 m, r 5 = 0,1 m. Šteje se, da je masa vsakega škripca enakomerno porazdeljena vzdolž njegovega zunanjega roba. . Nosilni ravnini uteži 1 in 2 sta grobi, koeficient drsnega trenja za vsako utež je f = 0,1.
Pod delovanjem sile F, katere modul se spreminja po zakonu F = F(s), kjer je s premik točke njene uporabe, se sistem začne premikati iz stanja mirovanja. Ko se sistem premika, na škripec 5 delujejo uporne sile, katerih moment glede na os vrtenja je konstanten in enak M 5 .
Določite vrednost kotne hitrosti škripca 4 v trenutku, ko postane premik s točke delovanja sile F enak s 1 = 1,2 m. 
Prenesite rešitev
Uporaba splošne enačbe dinamike za preučevanje gibanja mehanskega sistema
Za mehanski sistem določite linearni pospešek a 1 . Upoštevajte, da so pri blokih in valjih mase porazdeljene vzdolž zunanjega polmera. Kabli in pasovi veljajo za breztežne in neraztegljive; ni zdrsa. Ignorirajte kotalno in drsno trenje. 
Prenesite rešitev
Uporaba d'Alembertovega principa za določanje reakcij nosilcev vrtljivega telesa
Navpična gred AK, ki se enakomerno vrti s kotno hitrostjo ω = 10 s -1, je pritrjena s potisnim ležajem v točki A in cilindričnim ležajem v točki D.
Breztežna palica 1 z dolžino l 1 = 0,3 m je togo pritrjena na gred, na prostem koncu katere je obremenitev mase m 1 = 4 kg, in homogena palica 2 z dolžino l 2 = 0,6 m, z maso m 2 = 8 kg. Obe palici ležita v isti navpični ravnini. Točke pritrditve palic na gred, pa tudi koti α in β so navedeni v tabeli. Mere AB=BD=DE=EK=b, kjer je b = 0,4 m. Vzemite obremenitev kot materialno točko.
Če zanemarimo maso gredi, določimo reakcije potisnega ležaja in ležaja.

Splošni izreki dinamike sistema teles. Izreki o gibanju središča mase, o spremembi gibalne količine, o spremembi glavnega momenta gibalne količine, o spremembi kinetične energije. Načela d'Alemberta in možni premiki. Splošna enačba dinamike. Lagrangeove enačbe.
VsebinaDelo, ki ga opravi sila, je enak skalarnemu produktu vektorjev sil in neskončno majhnega premika točke njegove uporabe:
,
to je produkt modulov vektorjev F in ds ter kosinusa kota med njima.
Delo, opravljeno v trenutku sile, je enak skalarnemu produktu vektorjev trenutka in neskončno majhnega kota vrtenja :
.
d'Alembertovo načelo
Bistvo d'Alembertovega načela je reducirati probleme dinamike na probleme statike. Za to se predpostavlja (ali je vnaprej znano), da imajo telesa sistema določene (kotne) pospeške. Nato se uvedejo vztrajnostne sile in (ali) momenti vztrajnostnih sil, ki so po velikosti enake in vzajemne v smeri silam in momentom sil, ki bi po zakonih mehanike ustvarile dane pospeške ali kotne pospeške.
Razmislite o primeru. Telo izvaja translacijsko gibanje in nanj delujejo zunanje sile. Nadalje predpostavljamo, da te sile ustvarjajo pospešek središča mase sistema. Po izreku o gibanju središča mase bi imelo središče mase enak pospešek, če bi na telo delovala sila. Nato uvedemo vztrajnostno silo:
.
Po tem je naloga dinamike:
.
;
.
Za rotacijsko gibanje nadaljujte na podoben način. Naj se telo vrti okoli osi z in nanj delujejo zunanji momenti sil M e zk. Predpostavljamo, da ti momenti ustvarijo kotni pospešek ε z . Nato uvedemo moment vztrajnosti sil M И = - J z ε z . Po tem je naloga dinamike:
.
Spremeni se v statično nalogo:
;
.
Načelo možnih gibov
Za reševanje problemov statike se uporablja načelo možnih premikov. Pri nekaterih problemih daje krajšo rešitev kot pisanje ravnotežnih enačb. To še posebej velja za sisteme s povezavami (na primer sisteme teles, povezanih z nitmi in bloki), sestavljene iz številnih teles
Načelo možnih gibov.
Za ravnotežje mehanskega sistema z idealnimi omejitvami je potrebno in zadostno, da je vsota elementarnih del vseh aktivnih sil, ki delujejo nanj, za morebitni premik sistema enaka nič.
Možna selitev sistema- to je majhen premik, pri katerem povezave, ki so naložene sistemu, niso pretrgane.
Popolne povezave- to so obveznice, ki ne delujejo, ko se sistem premakne. Natančneje, vsota dela, ki ga opravijo same povezave pri premikanju sistema, je nič.
Splošna enačba dinamike (d'Alembert - Lagrangeov princip)
Načelo d'Alembert-Lagrangea je kombinacija d'Alembertovega principa z načelom možnih premikov. To pomeni, da pri reševanju problema dinamike uvedemo vztrajnostne sile in problem reduciramo na problem statičnosti, ki ga rešujemo po principu možnih premikov.
d'Alembert-Lagrangeovo načelo.
Ko se mehanski sistem v vsakem trenutku premika z idealnimi omejitvami, je vsota elementarnih del vseh uporabljenih aktivnih sil in vseh vztrajnostnih sil na morebitni premik sistema enaka nič:
.
Ta enačba se imenuje splošna enačba dinamike.
Lagrangeove enačbe
Posplošene koordinate q 1 , q 2 , ..., q n je niz n vrednosti, ki enolično določajo položaj sistema.
Število posplošenih koordinat n sovpada s številom stopenj svobode sistema.
Splošne hitrosti so izpeljanke posplošenih koordinat glede na čas t.
Generalizirane sile Q 1 , Q 2 , ..., Q n
.
Razmislite o možnem premiku sistema, pri katerem bo koordinata q k prejela premik δq k . Preostale koordinate ostanejo nespremenjene. Naj bo δA k delo, ki ga opravijo zunanje sile med takšnim premikom. Potem
δA k = Q k δq k , oz
.
Če se ob morebitnem premiku sistema vse koordinate spremenijo, potem ima delo zunanjih sil med takšnim premikom obliko:
δA = Q 1 δq 1 + Q 2 δq 2 + ... + Q n δq n.
Potem so posplošene sile delne izpeljanke premičnega dela:
.
Za potencialne sile s potencialom Π,
.
Lagrangeove enačbe so enačbe gibanja mehanskega sistema v posplošenih koordinatah:
Tukaj je T kinetična energija. Je funkcija posplošenih koordinat, hitrosti in morda časa. Zato je njegov delni izvod tudi funkcija posplošenih koordinat, hitrosti in časa. Nato morate upoštevati, da so koordinate in hitrosti funkcije časa. Zato, da bi našli izpeljanko celotnega časa, morate uporabiti pravilo diferenciacije kompleksne funkcije:
.
Reference:
S. M. Targ, Kratki tečaj teoretične mehanike, Višja šola, 2010.
Kot del vsakega učnega načrta se študij fizike začne z mehaniko. Ne iz teoretične, ne iz uporabne in ne računske, ampak iz dobre stare klasične mehanike. Ta mehanika se imenuje tudi Newtonova mehanika. Po legendi se je znanstvenik sprehajal po vrtu, videl padec jabolka in prav ta pojav ga je spodbudil, da je odkril zakon univerzalne gravitacije. Seveda je zakon vedno obstajal in Newton mu je dal le obliko, razumljivo ljudem, vendar je njegova zasluga neprecenljiva. V tem članku ne bomo čim bolj podrobno opisovali zakonov Newtonove mehanike, ampak bomo orisali osnove, osnovna znanja, definicije in formule, ki vam lahko vedno igrajo na roko.
Mehanika je veja fizike, veda, ki preučuje gibanje materialnih teles in interakcije med njimi.
Sama beseda je grškega izvora in se prevaja kot "umetnost gradnje strojev". Toda pred gradnjo strojev nas čaka še dolga pot, zato pojdimo po stopinjah naših prednikov in preučevali bomo gibanje kamnov, vrženih pod kotom proti obzorju, in jabolk, ki padajo na glave z višine h.

Zakaj se študij fizike začne z mehaniko? Ker je povsem naravno, ne da bi ga začeli iz termodinamičnega ravnovesja?!
Mehanika je ena najstarejših ved, zgodovinsko pa se je študij fizike začel prav pri temeljih mehanike. Postavljeni v okvir časa in prostora, ljudje pravzaprav ne bi mogli začeti iz nečesa drugega, ne glede na to, kako so si želeli. Gibajoča se telesa so prva stvar, na katero smo pozorni.
Kaj je gibanje?
Mehansko gibanje je sprememba položaja teles v prostoru drug glede na drugega skozi čas.
Po tej definiciji povsem naravno pridemo do koncepta referenčnega okvira. Spreminjanje položaja teles v prostoru glede na drugo. Ključne besede tukaj: drug glede na drugega . Konec koncev se potnik v avtomobilu giblje glede na osebo, ki stoji ob cesti, z določeno hitrostjo in počiva glede na soseda na bližnjem sedežu in se premika z neko drugo hitrostjo glede na potnika v avtomobilu, ki jih prehiteva.

Zato potrebujemo, da bi normalno izmerili parametre premikajočih se predmetov in se ne zmedli referenčni sistem - togo medsebojno povezano referenčno telo, koordinatni sistem in ura. Zemlja se na primer giblje okoli sonca v heliocentričnem referenčnem okviru. V vsakdanjem življenju skoraj vse meritve izvajamo v geocentričnem referenčnem sistemu, ki je povezan z Zemljo. Zemlja je referenčno telo, glede na katerega se premikajo avtomobili, letala, ljudje, živali.

Mehanika ima kot znanost svojo nalogo. Naloga mehanike je, da v vsakem trenutku pozna položaj telesa v prostoru. Z drugimi besedami, mehanika konstruira matematični opis gibanja in najde povezave med fizikalnimi količinami, ki ga označujejo.
Za napredek potrebujemo pojem » materialna točka ". Pravijo, da je fizika eksaktna znanost, a fiziki vedo, koliko približkov in predpostavk je treba narediti, da bi se strinjali prav o tej natančnosti. Nihče še ni videl materialne točke ali vohal idealnega plina, vendar obstajajo! Le z njimi je veliko lažje živeti.
Materialna točka je telo, katerega velikost in obliko lahko v kontekstu tega problema zanemarimo.
Odseki klasične mehanike
Mehanika je sestavljena iz več delov
- Kinematika
- Dinamika
- Statika
Kinematika s fizičnega vidika natančno preučuje, kako se telo giblje. Z drugimi besedami, ta razdelek obravnava kvantitativne značilnosti gibanja. Najdi hitrost, pot - tipične naloge kinematike
Dinamika rešuje vprašanje, zakaj se premika tako, kot se. To pomeni, da upošteva sile, ki delujejo na telo.
Statika preučuje ravnotežje teles pod delovanjem sil, torej odgovarja na vprašanje: zakaj sploh ne pade?
Meje uporabnosti klasične mehanike
Klasična mehanika ne trdi več, da je znanost, ki vse razlaga (na začetku prejšnjega stoletja je bilo vse povsem drugače) in ima jasen obseg uporabnosti. Na splošno veljajo zakoni klasične mehanike za svet, ki ga poznamo po velikosti (makrosvet). Nehajo delovati v primeru sveta delcev, ko klasično mehaniko nadomesti kvantna mehanika. Tudi klasična mehanika ni uporabna za primere, ko se gibanje teles odvija s hitrostjo, ki je blizu svetlobni. V takih primerih postanejo izraziti relativistični učinki. Grobo rečeno, v okviru kvantne in relativistične mehanike - klasične mehanike je to poseben primer, ko so dimenzije telesa velike, hitrost pa majhna.

Na splošno kvantni in relativistični učinki nikoli ne izginejo; potekajo tudi med običajnim gibanjem makroskopskih teles s hitrostjo, ki je veliko nižja od svetlobne. Druga stvar je, da je delovanje teh učinkov tako majhno, da ne presega najbolj natančnih meritev. Klasična mehanika tako nikoli ne bo izgubila svojega temeljnega pomena.
V prihodnjih člankih bomo nadaljevali s preučevanjem fizikalnih osnov mehanike. Za boljše razumevanje mehanike se lahko vedno obrnete na naših avtorjev, ki so posamezno osvetlili temno točko najtežje naloge.
Kinematika točke.
1. Predmet teoretična mehanika. Osnovne abstrakcije.
Teoretična mehanikaje znanost, v kateri se preučujejo splošne zakonitosti mehanskega gibanja in mehanske interakcije materialnih teles
Mehansko gibanjeimenujemo gibanje telesa glede na drugo telo, ki se dogaja v prostoru in času.
Mehanska interakcija se imenuje takšna interakcija materialnih teles, ki spremeni naravo njihovega mehanskega gibanja.
Statika - To je veja teoretične mehanike, ki preučuje metode za pretvorbo sistemov sil v enakovredne sisteme in vzpostavlja pogoje za ravnotežje sil, ki delujejo na trdno telo.
Kinematika - je veja teoretične mehanike, ki se ukvarja z gibanje materialnih teles v prostoru z geometrijskega vidika, ne glede na sile, ki nanje delujejo.
Dinamika - To je veja mehanike, ki preučuje gibanje materialnih teles v prostoru, odvisno od sil, ki delujejo nanje.
Predmeti študija teoretične mehanike:
materialna točka,
sistem materialnih točk,
Popolnoma togo telo.
Absolutni prostor in absolutni čas sta neodvisna drug od drugega. Absolutni prostor - tridimenzionalni, homogen, nepremičen evklidski prostor. Absolutni čas - neprekinjeno teče iz preteklosti v prihodnost, je homogena, enaka na vseh točkah prostora in ni odvisna od gibanja snovi.
2. Predmet kinematike.
Kinematika - to je veja mehanike, ki preučuje geometrijske lastnosti gibanja teles, ne da bi upoštevala njihovo vztrajnost (tj. maso) in sile, ki delujejo nanje.
Za določitev položaja gibajočega se telesa (ali točke) s telesom, glede na katerega se preučuje gibanje tega telesa, je togo povezan nek koordinatni sistem, ki skupaj s telesom tvori referenčni sistem.
Glavna naloga kinematike je, da ob poznavanju zakona gibanja danega telesa (točke) določimo vse kinematične količine, ki označujejo njegovo gibanje (hitrost in pospešek).
3. Metode za določanje premikanja točke
· naravni način
Moralo bi biti znano:
Pot gibanja točke;
Začetek in smer štetja;
Zakon gibanja točke po dani poti v obliki (1.1)
· Koordinatna metoda
Enačbe (1.2) so enačbe gibanja točke M.
Enačbo za trajektorijo točke M lahko dobimo z odpravo časovnega parametra « t » iz enačb (1.2)
· Vektorski način
|
|
(1.3) Razmerje med koordinatnimi in vektorskimi metodami za določanje gibanja točke
|

Povezava med koordinatnimi in naravnimi načini določanja gibanja točke
Določite trajektorijo točke, pri čemer ne upoštevate časa iz enačb (1.2);
-- poišči zakon gibanja točke vzdolž trajektorije (uporabi izraz za diferencial loka)
Po integraciji dobimo zakon gibanja točke vzdolž dane trajektorije:
Povezava med koordinatno in vektorsko metodo določanja gibanja točke je določena z enačbo (1.4)
4. Določanje hitrosti točke z vektorsko metodo določanja gibanja.
Naj trenutnotpoložaj točke je določen s polmerom vektorja in v trenutkut 1
– polmer-vektor , nato za določeno obdobje ![]() točka se bo premaknila.
točka se bo premaknila.
|
|
povprečna hitrost točke, smer vektorja je enaka vektorju
|

 (1.5)
(1.5)
Hitrost točke v določenem času
Da bi dobili hitrost točke v danem trenutku, je treba narediti prehod do meje
 (1.6)
(1.6)
(1.7)
Vektor hitrosti točke v določenem času je enak prvi izvod vektorja polmera glede na čas in je usmerjen tangencialno na trajektorijo v dani točki.
(enota¾ m/s, km/h)
Vektor povprečnega pospeška ima isto smer kot vektorΔ v , torej usmerjen proti konkavnosti poti.
Vektor pospeška točke v določenem času je enak prvi izvod vektorja hitrosti ali drugi izvod vektorja polmera točke glede na čas.
(enota - )
Kako se vektor nahaja glede na trajektorijo točke?
Pri pravokotnem gibanju je vektor usmerjen vzdolž premice, po kateri se točka premika. Če je trajektorija točke ravna krivulja, potem vektor pospeška, kot tudi vektor cp, ležita v ravnini te krivulje in je usmerjena proti njeni konkavnosti. Če trajektorija ni ravna krivulja, bo vektor cp usmerjen proti konkavnosti poti in bo ležal v ravnini, ki poteka skozi tangento na trajektorijo v točkiM in premico, vzporedno s tangento v sosednji točkiM 1 . V meja, ko je točkaM 1 nagiba k M ta ravnina zaseda položaj tako imenovane sosednje ravnine. Zato v splošnem primeru vektor pospeška leži v sosednji ravnini in je usmerjen proti konkavnosti krivulje.
 UCBrowser za osebni računalnik je vreden konkurent za hitri način brskalnika Google Chrome ali ne
UCBrowser za osebni računalnik je vreden konkurent za hitri način brskalnika Google Chrome ali ne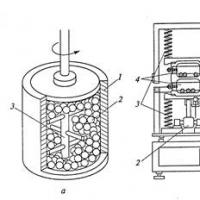 Osnovne tehnologije za pridobivanje nanomaterialov
Osnovne tehnologije za pridobivanje nanomaterialov Kako povedati čas v angleščini?
Kako povedati čas v angleščini? Predstavitev analitičnega poročila učitelja zgodovine Sodelovanje v strokovnih komisijah
Predstavitev analitičnega poročila učitelja zgodovine Sodelovanje v strokovnih komisijah Predstavitev analitičnega poročila učitelja zgodovine
Predstavitev analitičnega poročila učitelja zgodovine Predstavitev na temo "ateroskleroza"
Predstavitev na temo "ateroskleroza" Zgodovina številskih sistemov
Zgodovina številskih sistemov