Pangunahing mekanika para sa mga dummies. Panimula. Teoretikal na mekanika para sa mga inhinyero at mananaliksik
Kinematics
Kinematics ng isang materyal na punto
Pagpapasiya ng bilis at acceleration ng isang punto ayon sa ibinigay na mga equation ng paggalaw nito
Ibinigay: Mga equation ng paggalaw ng isang punto: x = 12 kasalanan(πt/6), cm; y= 6 cos 2 (πt/6), cm.
Itakda ang uri ng tilapon nito at para sa sandali ng oras t = 1 s hanapin ang posisyon ng isang punto sa tilapon, bilis nito, buo, tangential at normal na mga acceleration, pati na rin ang radius ng curvature ng trajectory.
Translational at rotational motion ng isang matibay na katawan

Ibinigay:
t = 2 s; r 1 = 2 cm, R 1 = 4 cm; r 2 = 6 cm, R 2 = 8 cm; r 3 \u003d 12 cm, R 3 \u003d 16 cm; s 5 \u003d t 3 - 6t (cm).
Tukuyin sa oras t = 2 ang bilis ng mga puntos A, C; angular acceleration ng gulong 3; point B acceleration at rack acceleration 4.
Kinematic analysis ng isang patag na mekanismo

Ibinigay:
R 1 , R 2 , L, AB, ω 1 .
Hanapin: ω 2 .

Ang patag na mekanismo ay binubuo ng mga rod 1, 2, 3, 4 at slider E. Ang mga rod ay konektado sa pamamagitan ng mga cylindrical na bisagra. Ang Point D ay matatagpuan sa gitna ng bar AB.
Ibinigay: ω 1 , ε 1 .
Hanapin ang: bilis V A , V B , V D at V E ; angular velocities ω 2 , ω 3 at ω 4 ; acceleration a B ; angular acceleration ε AB ng link AB; mga posisyon ng mga instant na sentro ng bilis P 2 at P 3 ng mga link 2 at 3 ng mekanismo.
Pagtukoy sa ganap na bilis at ganap na acceleration ng isang punto

Ang isang hugis-parihaba na plato ay umiikot sa paligid ng isang nakapirming axis ayon sa batas φ = 6 t 2 - 3 t 3. Ang positibong direksyon ng pagbabasa ng anggulo φ ay ipinapakita sa mga figure sa pamamagitan ng isang arc arrow. Rotation axis OO 1 namamalagi sa eroplano ng plato (ang plato ay umiikot sa espasyo).
Ang punto M ay gumagalaw kasama ang tuwid na linya BD kasama ang plato. Ang batas ng kamag-anak na paggalaw nito ay ibinigay, ibig sabihin, ang pagtitiwala s = AM = 40(t - 2 t 3) - 40(s - sa sentimetro, t - sa mga segundo). Distansya b = 20 cm. Sa figure, ang point M ay ipinapakita sa posisyon kung saan s = AM > 0 (para sa s< 0 Ang punto M ay nasa kabilang panig ng punto A).
Hanapin ang absolute speed at absolute acceleration ng point M sa oras t 1 = 1 s.
Dynamics
Pagsasama-sama ng mga differential equation ng paggalaw ng isang materyal na punto sa ilalim ng pagkilos ng mga variable na puwersa
Ang isang load D ng mass m, na nakatanggap ng isang paunang bilis V 0 sa punto A, ay gumagalaw sa isang curved pipe ABC na matatagpuan sa isang patayong eroplano. Sa seksyong AB, ang haba nito ay l, ang pagkarga ay apektado ng isang pare-parehong puwersa T (ang direksyon nito ay ipinapakita sa figure) at ang puwersa R ng paglaban ng daluyan (ang module ng puwersang ito ay R = μV 2, ang vector R ay nakadirekta sa tapat ng bilis ng V ng load).
Ang pag-load, na nakumpleto ang paggalaw nito sa seksyon AB, sa punto B ng tubo, nang hindi binabago ang halaga ng modulus ng bilis nito, ay pumasa sa seksyon BC. Sa seksyong BC, ang isang variable na puwersa F ay kumikilos sa pagkarga, ang projection F x kung saan sa x axis ay ibinigay.
Isinasaalang-alang ang pagkarga bilang isang materyal na punto, hanapin ang batas ng paggalaw nito sa seksyon BC, i.e. x = f(t), kung saan x = BD. Huwag pansinin ang friction ng load sa pipe.

I-download ang solusyon
Theorem sa pagbabago sa kinetic energy ng isang mekanikal na sistema
Ang mekanikal na sistema ay binubuo ng mga timbang 1 at 2, isang cylindrical roller 3, dalawang yugto na pulley 4 at 5. Ang mga katawan ng system ay konektado sa pamamagitan ng mga sinulid na sugat sa mga pulley; ang mga seksyon ng mga thread ay parallel sa kaukulang mga eroplano. Ang roller (solid homogeneous cylinder) ay gumulong sa reference plane nang hindi nadudulas. Ang radii ng mga hakbang ng pulleys 4 at 5 ay ayon sa pagkakabanggit R 4 = 0.3 m, r 4 = 0.1 m, R 5 = 0.2 m, r 5 = 0.1 m. Ang masa ng bawat pulley ay itinuturing na pantay na ipinamamahagi kasama ang panlabas na gilid nito . Ang mga sumusuporta sa mga eroplano ng mga timbang 1 at 2 ay magaspang, ang koepisyent ng sliding friction para sa bawat timbang ay f = 0.1.
Sa ilalim ng pagkilos ng puwersa F, ang modulus na nagbabago ayon sa batas F = F(s), kung saan ang s ay ang displacement ng punto ng aplikasyon nito, ang sistema ay nagsisimulang lumipat mula sa isang estado ng pahinga. Kapag gumagalaw ang sistema, ang mga puwersa ng paglaban ay kumikilos sa pulley 5, ang sandali kung saan nauugnay sa axis ng pag-ikot ay pare-pareho at katumbas ng M 5 .
Tukuyin ang halaga ng angular velocity ng pulley 4 sa sandaling ang displacement s ng point of application ng force F ay naging katumbas ng s 1 = 1.2 m. 
I-download ang solusyon
Application ng pangkalahatang equation ng dynamics sa pag-aaral ng paggalaw ng isang mekanikal na sistema
Para sa isang mekanikal na sistema, tukuyin ang linear acceleration a 1 . Isaalang-alang na para sa mga bloke at roller ang mga masa ay ipinamamahagi kasama ang panlabas na radius. Ang mga kable at sinturon ay itinuturing na walang timbang at hindi mapalawak; walang madulas. Huwag pansinin ang rolling at sliding friction. 
I-download ang solusyon
Ang paggamit ng prinsipyo ng d'Alembert sa pagpapasiya ng mga reaksyon ng mga suporta ng isang umiikot na katawan
Ang isang vertical shaft AK na umiikot nang pantay na may angular na bilis ω = 10 s -1 ay naayos na may thrust bearing sa punto A at isang cylindrical na tindig sa punto D.
Ang isang walang timbang na baras 1 na may haba na l 1 = 0.3 m ay mahigpit na nakakabit sa baras, sa libreng dulo kung saan mayroong isang load ng mass m 1 = 4 kg, at isang homogenous rod 2 na may haba na l 2 = 0.6 m, na may mass na m 2 = 8 kg. Ang parehong mga tungkod ay nakahiga sa parehong patayong eroplano. Ang mga punto ng attachment ng mga rod sa baras, pati na rin ang mga anggulo α at β ay ipinahiwatig sa talahanayan. Mga Dimensyon AB=BD=DE=EK=b, kung saan b = 0.4 m. Kunin ang load bilang isang materyal na punto.
Ang pagpapabaya sa masa ng baras, matukoy ang mga reaksyon ng thrust bearing at ang tindig.

ika-20 ed. - M.: 2010.- 416 p.
Binabalangkas ng libro ang mga batayan ng mekanika ng isang materyal na punto, ang sistema ng mga materyal na punto at isang solidong katawan sa isang volume na naaayon sa mga programa ng mga teknikal na unibersidad. Maraming mga halimbawa at gawain ang ibinigay, ang mga solusyon nito ay sinamahan ng naaangkop na mga alituntunin. Para sa mga mag-aaral ng full-time at correspondence na teknikal na unibersidad.
Format: pdf
Ang sukat: 14 MB
Panoorin, i-download: drive.google
TALAAN NG MGA NILALAMAN
Paunang salita sa ikalabintatlong edisyon 3
Panimula 5
SECTION ONE STATICS NG ISANG SOLID STATE
Kabanata I. Pangunahing konsepto mga panimulang probisyon ng mga artikulo 9
41. Ganap na matibay na katawan; kapangyarihan. Mga gawain ng estatika 9
12. Mga paunang probisyon ng statics » 11
$ 3. Mga koneksyon at ang kanilang mga reaksyon 15
Kabanata II. Komposisyon ng mga pwersa. Sistema ng nagtatagpong pwersa 18
§4. Geometrically! Paraan ng pagsasama-sama ng mga puwersa. Resulta ng nagsasama-samang pwersa, agnas ng pwersa 18
f 5. Force projection sa axis at sa eroplano, Analytical method para sa pagtatakda at pagdaragdag ng pwersa 20
16. Equilibrium ng sistema ng nagtatagpong pwersa_. . . 23
17. Paglutas ng mga problema ng statics. 25
Kabanata III. Sandali ng puwersa tungkol sa gitna. Power couple 31
i 8. Sandali ng puwersa sa gitna (o punto) 31
| 9. Isang pares ng mga puwersa. ilang sandali 33
f 10*. Equivalence at pair addition theorems 35
Kabanata IV. Dinadala ang sistema ng pwersa sa gitna. Mga kondisyon ng ekwilibriyo... 37
f 11. Parallel force transfer theorem 37
112. Ang pagdadala ng sistema ng pwersa sa isang partikular na sentro - . .38
§ 13. Mga kondisyon para sa ekwilibriyo ng isang sistema ng pwersa. Theorem sa sandali ng resultang 40
Kabanata V. Patag na sistema ng pwersa 41
§ 14. Algebraic na sandali ng puwersa at mga mag-asawa 41
115. Pagbawas ng isang patag na sistema ng pwersa sa pinakasimpleng anyo .... 44
§ 16. Equilibrium ng isang patag na sistema ng pwersa. Ang kaso ng parallel forces. 46
§ 17. Paglutas ng problema 48
118. Balanse ng mga sistema ng mga katawan 63
§ labinsiyam*. Statically determined at statically indeterminate system ng mga katawan (structure) 56"
f 20*. Kahulugan ng panloob na pwersa. 57
§ 21*. Naipamahagi na Puwersa 58
E22*. Pagkalkula ng mga flat trusses 61
Kabanata VI. Friction 64
! 23. Mga batas ng sliding friction 64
: 24. Mga magaspang na reaksyon ng bono. Anggulo ng friction 66
: 25. Equilibrium sa pagkakaroon ng friction 66
(26*. Thread friction sa isang cylindrical surface 69
1 27*. Rolling friction 71
Kabanata VII. Spatial na sistema ng pwersa 72
§28. Sandali ng puwersa tungkol sa axis. Pangunahing pagkalkula ng vector
at ang pangunahing sandali ng sistema ng pwersa 72
§ 29*. Pagbawas ng spatial system ng pwersa sa pinakasimpleng anyo 77
§tatlumpu. Ekwilibriyo ng isang arbitraryong spatial na sistema ng mga puwersa. Ang kaso ng parallel forces
Kabanata VIII. Sentro ng grabidad 86
§31. Sentro ng Parallel Forces 86
§ 32. Force field. Sentro ng grabidad ng isang matibay na katawan 88
§ 33. Mga coordinate ng mga sentro ng grabidad ng magkakatulad na katawan 89
§ 34. Mga pamamaraan para sa pagtukoy ng mga coordinate ng mga sentro ng grabidad ng mga katawan. 90
§ 35. Mga sentro ng grabidad ng ilang magkakatulad na katawan 93
IKALAWANG SEKSYON KINEMATICS NG ISANG PUNTO AT MATAG NA KATAWAN
Kabanata IX. Point kinematics 95
§ 36. Panimula sa kinematics 95
§ 37. Mga pamamaraan para sa pagtukoy ng paggalaw ng isang punto. . 96
§38. Point velocity vector,. 99
§ 39
§40. Pagtukoy sa bilis at acceleration ng isang punto gamit ang coordinate na paraan ng pagtukoy ng paggalaw 102
§41. Paglutas ng mga problema ng point kinematics 103
§ 42. Mga palakol ng natural na trihedron. Numerical speed value 107
§ 43. Tangent at normal na acceleration ng isang punto 108
§44. Ilang mga espesyal na kaso ng paggalaw ng isang punto sa software
§45. Mga graph ng paggalaw, bilis at acceleration ng point 112
§ 46. Paglutas ng problema< 114
§47*. Bilis at acceleration ng isang punto sa mga polar coordinate 116
Kabanata X. Mga galaw ng pagsasalin at pag-ikot ng isang matibay na katawan. . 117
§48. Kilusang pagsasalin 117
§ 49. Paikot na paggalaw ng isang matibay na katawan sa paligid ng isang axis. Angular Velocity at Angular Acceleration 119
§50. Uniporme at pare-parehong pag-ikot 121
§51. Mga bilis at acceleration ng mga punto ng umiikot na katawan 122
Kabanata XI. Plane-parallel motion ng isang matibay na katawan 127
§52. Mga equation ng plane-parallel motion (motion of a plane figure). Pagkabulok ng paggalaw sa pagsasalin at pag-ikot 127
§53*. Pagpapasiya ng mga trajectory ng mga punto ng figure ng eroplano 129
§54. Pagtukoy sa mga bilis ng mga puntos sa isang plane figure 130
§ 55. Ang teorama sa mga projection ng mga bilis ng dalawang punto ng katawan 131
§ 56. Pagpapasiya ng mga bilis ng mga punto ng isang figure ng eroplano gamit ang madalian na sentro ng mga bilis. Ang konsepto ng centroids 132
§57. Paglutas ng problema 136
§58*. Pagpapasiya ng mga acceleration ng mga punto ng figure ng eroplano 140
§59*. Agad na sentro ng acceleration "*"*
Kabanata XII*. Paggalaw ng isang matibay na katawan sa paligid ng isang nakapirming punto at paggalaw ng isang libreng matibay na katawan 147
§ 60. Paggalaw ng isang matibay na katawan na may isang nakapirming punto. 147
§61. Mga equation ng Kinematic Euler 149
§62. Mga bilis at acceleration ng body point 150
§ 63. Pangkalahatang kaso ng paggalaw ng isang libreng matibay na katawan 153
Kabanata XIII. Kumplikadong paggalaw ng punto 155
§ 64. Relative, figurative at absolute motions 155
§ 65, Velocity addition theorem » 156
§66. Ang theorem sa pagdaragdag ng mga accelerations (Coriols' theorem) 160
§67. Paglutas ng problema 16*
Kabanata XIV*. Kumplikadong galaw ng isang matigas na katawan 169
§68. Ang pagdaragdag ng mga paggalaw ng pagsasalin 169
§69. Pagdaragdag ng mga pag-ikot tungkol sa dalawang magkatulad na palakol 169
§70. Mga cylindrical na gear 172
§ 71. Pagdaragdag ng mga pag-ikot sa paligid ng mga intersecting axes 174
§72. Pagdaragdag ng mga paggalaw ng pagsasalin at pag-ikot. Pagkilos ng tornilyo 176
SEKSYON IKATLONG DYNAMICS NG ISANG PUNTO
Kabanata XV: Panimula sa dinamika. Mga batas ng dinamika 180
§ 73. Mga pangunahing konsepto at kahulugan 180
§ 74. Mga batas ng dinamika. Mga problema sa dinamika ng isang materyal na punto 181
§ 75. Mga sistema ng mga yunit 183
§76. Mga pangunahing uri ng pwersa 184
Kabanata XVI. Differential equation ng paggalaw ng isang punto. Paglutas ng mga problema ng point dynamics 186
§ 77. Differential equation, galaw ng isang materyal na punto No. 6
§ 78. Solusyon sa unang problema ng dinamika (pagtukoy ng mga puwersa mula sa isang partikular na paggalaw) 187
§ 79. Solusyon ng pangunahing problema ng dynamics sa rectilinear motion ng isang punto 189
§ 80. Mga halimbawa ng paglutas ng problema 191
§81*. Pagkahulog ng isang katawan sa isang lumalaban na medium (sa hangin) 196
§82. Solusyon ng pangunahing problema ng dynamics, na may curvilinear motion ng isang punto 197
Kabanata XVII. Pangkalahatang theorems ng point dynamics 201
§83. Ang dami ng paggalaw ng punto. Force Impulse 201
§ S4. Theorem sa pagbabago sa momentum ng isang punto 202
§ 85. Ang theorem sa pagbabago sa angular momentum ng isang punto (theorem of moments) "204
§86*. Kilusan sa ilalim ng pagkilos ng isang sentral na puwersa. Batas ng mga lugar.. 266
§ 8-7. Pilitin ang trabaho. Kapangyarihan 208
§88. Mga Halimbawa ng Pagkalkula ng Trabaho 210
§89. Theorem sa pagbabago sa kinetic energy ng isang punto. "... 213J
Kabanata XVIII. Hindi libre at relatibong paggalaw ng isang punto 219
§90. Hindi malayang paggalaw ng isang punto. 219
§91. Relatibong paggalaw ng isang punto 223
§ 92. Impluwensya ng pag-ikot ng Earth sa balanse at galaw ng mga katawan... 227
Seksyon 93*. Paglihis ng punto ng insidente mula sa patayo dahil sa pag-ikot ng Earth "230
Kabanata XIX. Mga rectilinear na pagbabagu-bago ng isang punto. . . 232
§ 94. Libreng panginginig ng boses nang hindi isinasaalang-alang ang mga puwersa ng paglaban 232
§ 95. Libreng oscillations na may malapot na resistensya (damped oscillations) 238
§96. Sapilitang panginginig ng boses. Resonance 241
Kabanata XX*. Paggalaw ng isang katawan sa larangan ng grabidad 250
§ 97. Paggalaw ng isang itinapon na katawan sa gravitational field ng Earth "250
§98. Mga artipisyal na satellite ng Earth. Elliptical trajectories. 254
§ 99. Ang konsepto ng kawalan ng timbang. "Mga sistema ng lokal na sanggunian 257
IKAAPAT NA SEKSIYON DYNAMICS NG ISANG SYSTEM AT MATAG NA KATAWAN
G i a v a XXI. Panimula sa system dynamics. mga sandali ng pagkawalang-galaw. 263
§ 100. Sistema ng mekanikal. Pinipilit ang panlabas at panloob 263
§ 101. Misa ng sistema. Sentro ng grabidad 264
§ 102. Sandali ng pagkawalang-galaw ng isang katawan tungkol sa isang axis. Radius ng pagkawalang-galaw. . 265
$ 103. Mga sandali ng pagkawalang-galaw ng isang katawan tungkol sa magkatulad na mga palakol. Huygens' theorem 268
§ 104*. centrifugal moments ng inertia. Mga konsepto tungkol sa mga pangunahing axes ng inertia ng katawan 269
$105*. Sandali ng pagkawalang-galaw ng isang katawan tungkol sa isang di-makatwirang axis. 271
Kabanata XXII. Ang teorama sa paggalaw ng sentro ng masa ng sistema 273
$ 106. Differential equation ng system motion 273
§ 107. Ang teorama sa paggalaw ng sentro ng masa 274
$ 108. Batas ng konserbasyon ng paggalaw ng sentro ng masa 276
§ 109. Paglutas ng problema 277
Kabanata XXIII. Theorem sa pagbabago sa dami ng isang movable system. . 280
$ PERO. Bilang ng sistema ng paggalaw 280
§111. Theorem sa pagbabago ng momentum 281
§ 112. Batas ng konserbasyon ng momentum 282
$113*. Paglalapat ng theorem sa paggalaw ng isang likido (gas) 284
§ 114*. Katawan ng variable na masa. Paggalaw ng rocket 287
Gdawa XXIV. Ang theorem sa pagbabago sa momentum ng system 290
§ 115. Ang pangunahing sandali ng dami ng paggalaw ng system 290
$ 116. Theorem sa pagbabago ng pangunahing sandali ng momentum ng system (teorem ng mga sandali) 292
$117. Ang batas ng konserbasyon ng pangunahing sandali ng momentum. . 294
$ 118. Paglutas ng problema 295
$119*. Paglalapat ng moment theorem sa paggalaw ng isang likido (gas) 298
§ 120. Mga kondisyon ng equilibrium para sa isang mekanikal na sistema 300
Kabanata XXV. Theorem sa pagbabago sa kinetic energy ng system. . 301.
§ 121. Kinetic energy ng system 301
$122. Ilang kaso ng pagkalkula ng trabaho 305
$ 123. Theorem sa pagbabago sa kinetic energy ng system 307
$ 124. Paglutas ng problema 310
$125*. Pinaghalong gawain "314
$ 126. Potensyal na force field at force function 317
$127, Potensyal na enerhiya. Batas ng konserbasyon ng mekanikal na enerhiya 320
Kabanata XXVI. "Paglalapat ng Mga Pangkalahatang Teorema sa Dynamics ng isang Matibay na Katawan 323
$12 at. Paikot na paggalaw ng isang matibay na katawan sa paligid ng isang nakapirming axis ". 323"
$ 129. Pisikal na palawit. Pang-eksperimentong pagpapasiya ng mga sandali ng pagkawalang-galaw. 326
$130. Plane-parallel motion ng isang matibay na katawan 328
$131*. Elementarya na teorya ng gyroscope 334
$132*. Paggalaw ng isang matibay na katawan sa paligid ng isang nakapirming punto at paggalaw ng isang libreng matibay na katawan 340
Kabanata XXVII. Prinsipyo ng d'Alembert 344
$ 133. Prinsipyo ni d'Alembert para sa isang punto at isang mekanikal na sistema. . 344
$ 134. Principal vector at principal moment of inertia forces 346
$ 135. Paglutas ng problema 348
$136*, Mga reaksyong didemic na kumikilos sa axis ng umiikot na katawan. Pagbalanse ng mga umiikot na katawan 352
Kabanata XXVIII. Ang prinsipyo ng mga posibleng displacement at ang pangkalahatang equation ng dynamics 357
§ 137. Pag-uuri ng mga koneksyon 357
§ 138. Mga posibleng displacement ng system. Bilang ng antas ng kalayaan. . 358
§ 139. Ang prinsipyo ng mga posibleng paggalaw 360
§ 140. Paglutas ng mga problema 362
§ 141. Pangkalahatang equation ng dynamics 367
Kabanata XXIX. Mga kondisyon ng ekwilibriyo at mga equation ng paggalaw ng system sa mga pangkalahatang coordinate 369
§ 142. Pangkalahatang mga coordinate at pangkalahatang bilis. . . 369
§ 143. Pangkalahatang pwersa 371
§ 144. Mga kondisyon ng equilibrium para sa isang sistema sa mga pangkalahatang coordinate 375
§ 145. Mga equation ni Lagrange 376
§ 146. Paglutas ng mga problema 379
Kabanata XXX*. Maliit na oscillations ng system sa paligid ng posisyon ng stable equilibrium 387
§ 147. Ang konsepto ng equilibrium stability 387
§ 148. Maliit na libreng vibrations ng isang sistema na may isang antas ng kalayaan 389
§ 149. Maliit na damped at forced oscillations ng isang sistema na may isang antas ng kalayaan 392
§ 150. Maliit na buod na mga oscillation ng isang sistema na may dalawang antas ng kalayaan 394
Kabanata XXXI. Teorya ng Elementarya na Epekto 396
§ 151. Basic equation ng theory of impact 396
§ 152. Pangkalahatang theorems ng theory of impact 397
§ 153. Salik sa pagbawi ng epekto 399
§ 154. Epekto ng katawan sa isang nakapirming hadlang 400
§ 155. Direktang sentral na epekto ng dalawang katawan (epekto ng mga bola) 401
§ 156. Pagkawala ng kinetic energy sa panahon ng inelastic na epekto ng dalawang katawan. Carnot's theorem 403
§ 157*. Isang suntok sa umiikot na katawan. Impact Center 405
Index 409
Pangkalahatang theorems ng dinamika ng isang sistema ng mga katawan. Theorems sa paggalaw ng sentro ng masa, sa pagbabago sa momentum, sa pagbabago sa pangunahing sandali ng momentum, sa pagbabago sa kinetic energy. Mga prinsipyo ng d'Alembert, at posibleng mga displacement. Pangkalahatang equation ng dynamics. Mga equation ni Lagrange.
NilalamanAng gawaing ginawa ng puwersa, ay katumbas ng scalar product ng force vectors at ang infinitesimal na displacement ng punto ng aplikasyon nito :
,
iyon ay, ang produkto ng mga module ng mga vectors F at ds at ang cosine ng anggulo sa pagitan nila.
Ang gawaing ginawa ng sandali ng puwersa, ay katumbas ng scalar product ng mga vectors ng moment at ang infinitesimal na anggulo ng pag-ikot :
.
prinsipyo ng d'Alembert
Ang kakanyahan ng prinsipyo ni d'Alembert ay upang bawasan ang mga problema ng dynamics sa mga problema ng statics. Upang gawin ito, ipinapalagay (o ito ay kilala nang maaga) na ang mga katawan ng system ay may ilang mga (angular) accelerations. Susunod, ang mga puwersa ng pagkawalang-galaw at (o) mga sandali ng mga puwersa ng pagkawalang-galaw ay ipinakilala, na katumbas ng magnitude at katumbas ng direksyon sa mga puwersa at mga sandali ng mga puwersa, na, ayon sa mga batas ng mekanika, ay lilikha ng mga ibinigay na acceleration o angular accelerations.
Isaalang-alang ang isang halimbawa. Gumagawa ang katawan ng paggalaw ng pagsasalin at kumikilos dito ang mga panlabas na puwersa. Dagdag pa, ipinapalagay namin na ang mga puwersang ito ay lumilikha ng isang acceleration ng sentro ng masa ng system . Ayon sa theorem sa paggalaw ng sentro ng masa, ang sentro ng masa ng isang katawan ay magkakaroon ng parehong acceleration kung ang isang puwersa ay kumilos sa katawan. Susunod, ipinakilala namin ang puwersa ng pagkawalang-galaw:
.
Pagkatapos nito, ang gawain ng dinamika ay:
.
;
.
Para sa paikot na paggalaw ay magpatuloy sa katulad na paraan. Hayaang umikot ang katawan sa paligid ng z axis at mga panlabas na sandali ng mga pwersang M e zk na kumilos dito. Ipinapalagay namin na ang mga sandaling ito ay lumilikha ng isang angular acceleration ε z . Susunod, ipinakilala namin ang sandali ng mga puwersa ng inertia M И = - J z ε z . Pagkatapos nito, ang gawain ng dinamika ay:
.
Nagiging static na gawain:
;
.
Ang prinsipyo ng mga posibleng paggalaw
Ang prinsipyo ng mga posibleng displacements ay ginagamit upang malutas ang mga problema ng statics. Sa ilang mga problema, nagbibigay ito ng mas maikling solusyon kaysa sa pagsusulat ng mga equation ng ekwilibriyo. Ito ay totoo lalo na para sa mga system na may mga koneksyon (halimbawa, mga sistema ng mga katawan na konektado sa pamamagitan ng mga thread at mga bloke), na binubuo ng maraming mga katawan
Ang prinsipyo ng mga posibleng paggalaw.
Para sa equilibrium ng isang mekanikal na sistema na may perpektong mga hadlang, kinakailangan at sapat na ang kabuuan ng mga elementarya na gawa ng lahat ng mga aktibong pwersa na kumikilos dito para sa anumang posibleng pag-aalis ng sistema ay katumbas ng zero.
Posibleng paglipat ng system- ito ay isang maliit na displacement, kung saan ang mga koneksyon na ipinataw sa system ay hindi nasira.
Mga Perpektong Koneksyon- ito ay mga bono na hindi gumagana kapag ang sistema ay inilipat. Mas tiyak, ang kabuuan ng trabaho na ginawa ng mga link sa kanilang sarili kapag inililipat ang system ay zero.
Pangkalahatang equation ng dynamics (d'Alembert - Lagrange na prinsipyo)
Ang prinsipyo ng d'Alembert-Lagrange ay isang kumbinasyon ng prinsipyo ng d'Alembert na may prinsipyo ng posibleng mga displacement. Iyon ay, kapag nilulutas ang problema ng dynamics, ipinakilala namin ang mga puwersa ng pagkawalang-galaw at binabawasan ang problema sa problema ng statics, na nilulutas namin gamit ang prinsipyo ng posibleng mga displacement.
Prinsipyo ng d'Alembert-Lagrange.
Kapag ang isang mekanikal na sistema ay gumagalaw nang may perpektong mga hadlang sa bawat sandali ng oras, ang kabuuan ng mga elementarya na gawa ng lahat ng inilapat na aktibong pwersa at lahat ng mga puwersa ng pagkawalang-kilos sa anumang posibleng pag-aalis ng system ay katumbas ng zero:
.
Ang equation na ito ay tinatawag pangkalahatang equation ng dynamics.
Lagrange equation
Pangkalahatang mga coordinate q 1 , q 2 , ..., q n ay isang hanay ng mga n value na natatanging tumutukoy sa posisyon ng system.
Ang bilang ng mga pangkalahatang coordinate n ay tumutugma sa bilang ng mga antas ng kalayaan ng system.
Mga pangkalahatang bilis ay ang mga derivatives ng pangkalahatang mga coordinate na may paggalang sa oras t.
Pangkalahatang pwersa Q 1 , Q 2 , ..., Q n
.
Isaalang-alang ang isang posibleng pag-aalis ng system, kung saan ang coordinate q k ay makakatanggap ng isang displacement δq k . Ang natitirang mga coordinate ay nananatiling hindi nagbabago. Hayaang ang δA k ay ang gawaing ginawa ng mga panlabas na puwersa sa panahon ng naturang pag-aalis. Pagkatapos
δA k = Q k δq k , o
.
Kung, sa isang posibleng pag-aalis ng system, ang lahat ng mga coordinate ay nagbabago, kung gayon ang gawaing ginawa ng mga panlabas na puwersa sa panahon ng naturang pag-aalis ay may anyo:
δA = Q 1 δq 1 + Q 2 δq 2 + ... + Q n δq n.
Kung gayon ang mga pangkalahatang pwersa ay bahagyang derivatives ng displacement work:
.
Para sa mga potensyal na pwersa may potensyal na Π,
.
Lagrange equation ay ang mga equation ng paggalaw ng isang mekanikal na sistema sa pangkalahatang mga coordinate:
Narito ang T ay ang kinetic energy. Ito ay isang function ng mga pangkalahatang coordinate, bilis, at posibleng oras. Samakatuwid, ang partial derivative nito ay isang function din ng generalized coordinates, velocities, at time. Susunod, kailangan mong isaalang-alang na ang mga coordinate at velocities ay mga function ng oras. Samakatuwid, upang mahanap ang kabuuang derivative ng oras, kailangan mong ilapat ang panuntunan ng pagkita ng kaibahan ng isang kumplikadong function:
.
Mga sanggunian:
S. M. Targ, Maikling Kurso sa Theoretical Mechanics, Higher School, 2010.
Sa ilalim ng estado ng equilibrium, sa statics, ay nauunawaan ang estado kung saan ang lahat ng bahagi ng mekanikal na sistema ay nakapahinga kaugnay sa ilang inertial coordinate system. Ang isa sa mga pangunahing bagay ng statics ay ang mga puwersa at punto ng kanilang aplikasyon.
Ang puwersa na kumikilos sa isang materyal na punto na may radius vector mula sa iba pang mga punto ay isang sukatan ng impluwensya ng iba pang mga punto sa isinasaalang-alang na punto, bilang isang resulta kung saan ito ay tumatanggap ng acceleration na may kaugnayan sa inertial reference frame. Halaga lakas ay tinutukoy ng formula:
,
kung saan ang m ay ang masa ng punto - isang halaga na nakasalalay sa mga katangian ng punto mismo. Ang pormula na ito ay tinatawag na pangalawang batas ni Newton.
Application ng statics sa dynamics
Ang isang mahalagang katangian ng mga equation ng paggalaw ng isang ganap na matibay na katawan ay ang mga puwersa ay maaaring ma-convert sa mga katumbas na sistema. Sa gayong pagbabago, ang mga equation ng paggalaw ay nagpapanatili ng kanilang anyo, ngunit ang sistema ng mga puwersa na kumikilos sa katawan ay maaaring mabago sa isang mas simpleng sistema. Kaya, ang punto ng aplikasyon ng puwersa ay maaaring ilipat sa linya ng pagkilos nito; ang mga puwersa ay maaaring palawakin ayon sa tuntunin ng paralelogram; Ang mga puwersang inilapat sa isang punto ay maaaring mapalitan ng kanilang geometric na kabuuan.
Ang isang halimbawa ng gayong mga pagbabago ay ang gravity. Ito ay kumikilos sa lahat ng mga punto ng isang matibay na katawan. Ngunit ang batas ng paggalaw ng katawan ay hindi magbabago kung ang puwersa ng grabidad na ibinahagi sa lahat ng mga punto ay papalitan ng isang vector na inilapat sa gitna ng masa ng katawan.
Lumalabas na kung magdaragdag tayo ng isang katumbas na sistema sa pangunahing sistema ng mga puwersa na kumikilos sa katawan, kung saan ang mga direksyon ng mga puwersa ay nababaligtad, kung gayon ang katawan, sa ilalim ng pagkilos ng mga sistemang ito, ay nasa ekwilibriyo. Kaya, ang gawain ng pagtukoy ng mga katumbas na sistema ng mga puwersa ay nabawasan sa problema ng ekwilibriyo, iyon ay, sa problema ng statics.
Ang pangunahing gawain ng statics ay ang pagtatatag ng mga batas para sa pagbabago ng isang sistema ng pwersa sa mga katumbas na sistema. Kaya, ang mga pamamaraan ng statics ay ginagamit hindi lamang sa pag-aaral ng mga katawan sa ekwilibriyo, kundi pati na rin sa dinamika ng isang matibay na katawan, sa pagbabago ng mga pwersa sa mas simpleng katumbas na mga sistema.
Mga static na punto ng materyal
Isaalang-alang ang isang materyal na punto na nasa ekwilibriyo. At hayaang kumilos ang n pwersa dito, k = 1, 2, ..., n.
Kung ang punto ng materyal ay nasa equilibrium, kung gayon ang kabuuan ng vector ng mga puwersang kumikilos dito ay katumbas ng zero:
(1)
.
Sa equilibrium, ang geometric na kabuuan ng mga puwersang kumikilos sa isang punto ay zero.
Geometric na interpretasyon. Kung ang simula ng pangalawang vector ay inilagay sa dulo ng unang vector, at ang simula ng pangatlo ay inilalagay sa dulo ng pangalawang vector, at pagkatapos ang prosesong ito ay ipagpapatuloy, pagkatapos ay ang dulo ng huling, nth vector ay isasama sa simula ng unang vector. Iyon ay, nakakakuha kami ng isang closed geometric figure, ang mga haba ng mga gilid na kung saan ay katumbas ng mga module ng mga vectors. Kung ang lahat ng mga vector ay namamalagi sa parehong eroplano, pagkatapos ay makakakuha tayo ng isang saradong polygon.
Ito ay madalas na maginhawa upang pumili rectangular coordinate system Oxyz. Kung gayon ang mga kabuuan ng mga projection ng lahat ng mga vector ng puwersa sa mga coordinate axes ay katumbas ng zero:
Kung pipili ka ng anumang direksyon na tinukoy ng ilang vector , kung gayon ang kabuuan ng mga projection ng mga force vector sa direksyong ito ay katumbas ng zero:
.
Pina-multiply namin ang equation (1) nang scalar sa vector:
.
Narito ang scalar product ng mga vectors at .
Tandaan na ang projection ng isang vector sa direksyon ng vector ay tinutukoy ng formula:
.
Matibay na static ng katawan
Sandali ng puwersa tungkol sa isang punto
Pagtukoy sa sandali ng puwersa
Sandali ng puwersa, na inilapat sa katawan sa punto A, na nauugnay sa nakapirming sentro O, ay tinatawag na isang vector na katumbas ng produkto ng vector ng mga vector at:(2) .
Geometric na interpretasyon

Ang sandali ng puwersa ay katumbas ng produkto ng puwersa F at braso OH.
Hayaan ang mga vectors at matatagpuan sa eroplano ng figure. Ayon sa pag-aari ng cross product, ang vector ay patayo sa mga vectors at , iyon ay, patayo sa eroplano ng figure. Ang direksyon nito ay tinutukoy ng tamang panuntunan ng tornilyo. Sa figure, ang moment vector ay nakadirekta sa amin. Ang ganap na halaga ng sandali:
.
Dahil, kung gayon
(3)
.
Gamit ang geometry, ang isa ay maaaring magbigay ng isa pang interpretasyon ng sandali ng puwersa. Upang gawin ito, gumuhit ng isang tuwid na linya AH sa pamamagitan ng force vector . Mula sa gitna O ibinabagsak namin ang patayo OH sa linyang ito. Ang haba ng patayo na ito ay tinatawag balikat ng lakas. Pagkatapos
(4)
.
Dahil , ang mga formula (3) at (4) ay katumbas.
Sa ganitong paraan, ganap na halaga ng sandali ng puwersa kamag-anak sa gitnang O ay produkto ng puwersa sa balikat ang puwersang ito na may kaugnayan sa napiling sentro O .
Kapag kinakalkula ang sandali, kadalasan ay maginhawa upang mabulok ang puwersa sa dalawang bahagi:
,
saan . Ang puwersa ay dumadaan sa punto O. Samakatuwid, ang momentum nito ay zero. Pagkatapos
.
Ang ganap na halaga ng sandali:
.
Mga bahagi ng sandali sa mga parihaba na coordinate
Kung pipiliin natin ang isang hugis-parihaba na coordinate system na Oxyz na nakasentro sa puntong O, kung gayon ang sandali ng puwersa ay magkakaroon ng mga sumusunod na bahagi:
(5.1)
;
(5.2)
;
(5.3)
.
Narito ang mga coordinate ng point A sa napiling coordinate system:
.
Ang mga bahagi ay ang mga halaga ng sandali ng puwersa tungkol sa mga palakol, ayon sa pagkakabanggit.
Mga katangian ng sandali ng puwersa tungkol sa sentro
Ang sandali tungkol sa sentro O, mula sa puwersa na dumadaan sa sentrong ito, ay katumbas ng zero.
Kung ang punto ng aplikasyon ng puwersa ay inilipat sa isang linya na dumadaan sa vector ng puwersa, kung gayon ang sandali, sa panahon ng naturang paggalaw, ay hindi magbabago.
Ang sandali mula sa vector sum ng mga puwersa na inilapat sa isang punto ng katawan ay katumbas ng vector sum ng mga sandali mula sa bawat pwersang inilapat sa parehong punto:
.
Ang parehong naaangkop sa mga puwersa na ang mga linya ng extension ay nagsalubong sa isang punto.
Kung ang kabuuan ng vector ng mga puwersa ay zero:
,
kung gayon ang kabuuan ng mga sandali mula sa mga puwersang ito ay hindi nakasalalay sa posisyon ng sentro, na nauugnay kung saan kinakalkula ang mga sandali:
.
Power couple
Power couple- ito ay dalawang puwersa na katumbas ng ganap na halaga at may magkasalungat na direksyon, na inilalapat sa iba't ibang mga punto ng katawan.
Ang isang pares ng mga puwersa ay nailalarawan sa pamamagitan ng sandaling lumikha sila. Dahil ang kabuuan ng vector ng mga puwersa na kasama sa pares ay zero, ang sandali na nilikha ng mag-asawa ay hindi nakasalalay sa punto na nauugnay sa kung saan ang sandali ay kinakalkula. Mula sa punto ng view ng static equilibrium, ang likas na katangian ng mga puwersa sa pares ay hindi nauugnay. Ang isang pares ng mga puwersa ay ginagamit upang ipahiwatig na ang isang sandali ng mga puwersa ay kumikilos sa katawan, na may isang tiyak na halaga.
Sandali ng puwersa tungkol sa isang ibinigay na axis
Kadalasan mayroong mga kaso kung kailan hindi natin kailangang malaman ang lahat ng mga bahagi ng sandali ng puwersa tungkol sa isang napiling punto, ngunit kailangan lamang malaman ang sandali ng puwersa tungkol sa isang napiling axis.
Ang sandali ng puwersa tungkol sa axis na dumadaan sa punto O ay ang projection ng vector ng sandali ng puwersa, tungkol sa punto O, sa direksyon ng axis.
Mga katangian ng sandali ng puwersa tungkol sa axis
Ang sandali tungkol sa axis mula sa puwersa na dumadaan sa axis na ito ay katumbas ng zero.
Ang sandali tungkol sa isang axis mula sa isang puwersa na kahanay sa axis na ito ay zero.
Pagkalkula ng sandali ng puwersa tungkol sa isang axis

Hayaang kumilos ang puwersa sa katawan sa punto A. Hanapin natin ang sandali ng puwersang ito na may kaugnayan sa axis ng O′O′′.
Bumuo tayo ng isang rectangular coordinate system. Hayaang tumugma ang Oz axis sa O′O′′ . Mula sa puntong A ay ibinabagsak natin ang patayo na OH hanggang O′O′′. Sa pamamagitan ng mga puntos na O at A ay iginuhit namin ang axis na Ox. Iginuhit namin ang axis Oy patayo sa Ox at Oz. Binubulok namin ang puwersa sa mga bahagi kasama ang mga axes ng coordinate system:
.
Ang puwersa ay tumatawid sa O′O′′ axis. Samakatuwid, ang momentum nito ay zero. Ang puwersa ay parallel sa O′O′′ axis. Samakatuwid, ang sandali nito ay zero din. Sa pamamagitan ng formula (5.3) makikita natin:
.
Tandaan na ang bahagi ay nakadirekta nang tangential sa bilog na ang sentro ay ang puntong O . Ang direksyon ng vector ay tinutukoy ng tamang panuntunan ng turnilyo.
Mga kondisyon ng balanse para sa isang matibay na katawan
Sa equilibrium, ang vector sum ng lahat ng pwersang kumikilos sa katawan ay katumbas ng zero at ang vector sum ng mga sandali ng mga pwersang ito na nauugnay sa isang arbitrary na fixed center ay katumbas ng zero:
(6.1)
;
(6.2)
.
Binibigyang-diin namin na ang sentro O , na nauugnay kung saan kinakalkula ang mga sandali ng mga puwersa, ay maaaring mapili nang arbitraryo. Ang punto O ay maaaring kabilang sa katawan o nasa labas nito. Karaniwan ang sentro O ay pinili upang gawing mas madali ang mga kalkulasyon.
Ang mga kondisyon ng ekwilibriyo ay maaaring mabuo sa ibang paraan.
Sa equilibrium, ang kabuuan ng mga projection ng mga puwersa sa anumang direksyon na ibinigay ng isang di-makatwirang vector ay katumbas ng zero:
.
Ang kabuuan ng mga sandali ng mga puwersa tungkol sa isang arbitrary axis O′O′′ ay katumbas din ng zero:
.
Minsan ang mga kundisyong ito ay mas maginhawa. May mga pagkakataon na, sa pamamagitan ng pagpili ng mga palakol, ang mga kalkulasyon ay maaaring gawing mas simple.
Sentro ng grabidad ng katawan
Isaalang-alang ang isa sa pinakamahalagang pwersa - gravity. Dito, ang mga puwersa ay hindi inilalapat sa ilang mga punto ng katawan, ngunit patuloy na ipinamamahagi sa dami nito. Para sa bawat bahagi ng katawan na may napakaliit na dami ∆V, kumikilos ang gravitational force. Narito ang ρ ay ang density ng substance ng katawan, ay ang acceleration ng free fall.
Hayaan ang masa ng isang walang katapusang maliit na bahagi ng katawan. At hayaan ang puntong A k na tukuyin ang posisyon ng seksyong ito. Hanapin natin ang mga dami na nauugnay sa puwersa ng grabidad, na kasama sa mga equation ng equilibrium (6).
Hanapin natin ang kabuuan ng mga puwersa ng grabidad na nabuo ng lahat ng bahagi ng katawan:
,
nasaan ang masa ng katawan. Kaya, ang kabuuan ng mga puwersa ng gravity ng mga indibidwal na infinitesimal na bahagi ng katawan ay maaaring mapalitan ng isang gravity vector ng buong katawan:
.
Hanapin natin ang kabuuan ng mga sandali ng mga puwersa ng grabidad, na nauugnay sa napiling sentro O sa isang arbitrary na paraan:
.
Dito namin ipinakilala ang point C na tinatawag sentro ng grabidad katawan. Ang posisyon ng sentro ng grabidad, sa isang sistema ng coordinate na nakasentro sa punto O, ay tinutukoy ng formula:
(7)
.
Kaya, kapag tinutukoy ang static equilibrium, ang kabuuan ng mga puwersa ng grabidad ng mga indibidwal na seksyon ng katawan ay maaaring mapalitan ng resulta.
,
inilapat sa sentro ng masa ng katawan C , na ang posisyon ay tinutukoy ng formula (7).
Ang posisyon ng sentro ng grabidad para sa iba't ibang mga geometric na hugis ay matatagpuan sa mga nauugnay na reference na libro. Kung ang katawan ay may isang axis o eroplano ng mahusay na proporsyon, kung gayon ang sentro ng grabidad ay matatagpuan sa axis o eroplanong ito. Kaya, ang mga sentro ng grabidad ng isang globo, bilog o bilog ay matatagpuan sa mga sentro ng mga bilog ng mga figure na ito. Ang mga sentro ng grabidad ng isang hugis-parihaba na parallelepiped, parihaba o parisukat ay matatagpuan din sa kanilang mga sentro - sa mga punto ng intersection ng mga diagonal.

Uniformly (A) at linearly (B) na ibinahagi ng load.
Mayroon ding mga kaso na katulad ng puwersa ng grabidad, kapag ang mga puwersa ay hindi inilapat sa ilang mga punto ng katawan, ngunit patuloy na ipinamamahagi sa ibabaw o dami nito. Ang ganitong mga puwersa ay tinatawag ipinamahagi na pwersa o .
(Larawan A). Gayundin, tulad ng sa kaso ng gravity, maaari itong mapalitan ng resultang puwersa ng magnitude , na inilapat sa sentro ng grabidad ng diagram. Dahil ang diagram sa figure A ay isang parihaba, ang sentro ng grabidad ng diagram ay nasa gitna nito - punto C: | AC| = | CB |. (larawan B). Maaari din itong palitan ng resulta. Ang halaga ng resulta ay katumbas ng lugar ng diagram:.
Ang punto ng aplikasyon ay nasa gitna ng gravity ng balangkas. Ang sentro ng grabidad ng isang tatsulok, taas h, ay nasa layo mula sa base. Kaya .
Mga puwersa ng alitan
Sliding friction. Hayaang ang katawan ay nasa patag na ibabaw. At maging isang puwersa na patayo sa ibabaw kung saan kumikilos ang ibabaw sa katawan (pwersa ng presyon). Pagkatapos ay ang sliding friction force ay parallel sa ibabaw at nakadirekta sa gilid, na pumipigil sa katawan mula sa paggalaw. Ang pinakamalaking halaga nito ay:
,
kung saan ang f ay ang koepisyent ng friction. Ang koepisyent ng friction ay isang walang sukat na dami.
lumiligid na alitan. Hayaang gumulong ang bilugan na katawan o maaaring gumulong sa ibabaw. At hayaan ang puwersa ng presyon na patayo sa ibabaw kung saan kumikilos ang ibabaw sa katawan. Pagkatapos sa katawan, sa punto ng pakikipag-ugnay sa ibabaw, ang sandali ng mga puwersa ng alitan ay kumikilos, na pumipigil sa paggalaw ng katawan. Ang pinakamalaking halaga ng friction moment ay:
,
kung saan ang δ ay ang coefficient ng rolling friction. Ito ay may sukat ng haba.
Mga sanggunian:
S. M. Targ, Maikling Kurso sa Theoretical Mechanics, Higher School, 2010.
Bilang bahagi ng anumang kurikulum, ang pag-aaral ng pisika ay nagsisimula sa mechanics. Hindi mula sa teoretikal, hindi mula sa inilapat at hindi computational, ngunit mula sa mahusay na lumang klasikal na mekanika. Ang mechanics na ito ay tinatawag ding Newtonian mechanics. Ayon sa alamat, ang siyentipiko ay naglalakad sa hardin, nakakita ng isang mansanas na nahulog, at ito ang kababalaghan na nag-udyok sa kanya upang matuklasan ang batas ng unibersal na grabitasyon. Siyempre, ang batas ay palaging umiiral, at binigyan lamang ito ni Newton ng isang form na naiintindihan ng mga tao, ngunit ang kanyang merito ay hindi mabibili ng salapi. Sa artikulong ito, hindi namin ilalarawan ang mga batas ng Newtonian mechanics sa mas maraming detalye hangga't maaari, ngunit ilalarawan namin ang mga pangunahing kaalaman, pangunahing kaalaman, mga kahulugan at mga pormula na palaging maaaring maglaro sa iyong mga kamay.
Ang mekanika ay isang sangay ng pisika, isang agham na nag-aaral sa paggalaw ng mga materyal na katawan at ang mga pakikipag-ugnayan sa pagitan nila.
Ang salitang mismo ay nagmula sa Greek at isinalin bilang "ang sining ng paggawa ng mga makina". Ngunit bago gumawa ng mga makina, malayo pa ang ating lalakbayin, kaya't sundan natin ang mga yapak ng ating mga ninuno, at ating pag-aaralan ang galaw ng mga batong ibinabato sa isang anggulo hanggang sa abot-tanaw, at mga mansanas na nahuhulog sa mga ulo mula sa taas h.

Bakit nagsisimula ang pag-aaral ng pisika sa mechanics? Dahil ito ay ganap na natural, hindi upang simulan ito mula sa thermodynamic equilibrium?!
Ang mekanika ay isa sa mga pinakalumang agham, at sa kasaysayan ang pag-aaral ng pisika ay nagsimula nang tumpak sa mga pundasyon ng mekanika. Inilagay sa loob ng balangkas ng oras at espasyo, ang mga tao, sa katunayan, ay hindi maaaring magsimula sa ibang bagay, gaano man nila gusto. Ang mga gumagalaw na katawan ang una nating binibigyang pansin.
Ano ang paggalaw?
Ang mekanikal na paggalaw ay isang pagbabago sa posisyon ng mga katawan sa espasyo na may kaugnayan sa bawat isa sa paglipas ng panahon.
Ito ay pagkatapos ng kahulugan na ito na tayo ay natural na dumating sa konsepto ng isang frame of reference. Pagbabago ng posisyon ng mga katawan sa espasyo na may kaugnayan sa bawat isa. Mga pangunahing salita dito: kamag-anak sa isa't isa . Pagkatapos ng lahat, ang isang pasahero sa isang kotse ay gumagalaw na may kaugnayan sa isang taong nakatayo sa gilid ng kalsada sa isang tiyak na bilis, at nagpapahinga na may kaugnayan sa kanyang kapitbahay sa isang malapit na upuan, at kumikilos sa ibang bilis na may kaugnayan sa isang pasahero sa isang kotse na umabot sa kanila.

Iyon ang dahilan kung bakit, upang normal na masukat ang mga parameter ng mga gumagalaw na bagay at hindi malito, kailangan natin reference system - mahigpit na magkakaugnay na reference body, coordinate system at orasan. Halimbawa, ang mundo ay gumagalaw sa paligid ng araw sa isang heliocentric frame of reference. Sa pang-araw-araw na buhay, ginagawa namin ang halos lahat ng aming mga sukat sa isang geocentric reference system na nauugnay sa Earth. Ang daigdig ay isang reference body na nauugnay sa kung saan gumagalaw ang mga sasakyan, eroplano, tao, hayop.

Ang mga mekanika, bilang isang agham, ay may sariling gawain. Ang gawain ng mekanika ay malaman ang posisyon ng katawan sa kalawakan anumang oras. Sa madaling salita, ang mga mekanika ay gumagawa ng isang matematikal na paglalarawan ng paggalaw at nakakahanap ng mga koneksyon sa pagitan ng mga pisikal na dami na nagpapakilala dito.
Upang makasulong pa, kailangan natin ang paniwala ng " materyal na punto ". Sinasabi nila na ang pisika ay isang eksaktong agham, ngunit alam ng mga pisiko kung gaano karaming mga pagtatantya at pagpapalagay ang kailangang gawin upang magkasundo sa mismong katumpakan na ito. Wala pang nakakita ng materyal na punto o nakasinghot ng perpektong gas, ngunit umiiral ang mga ito! Mas madali lang silang pakisamahan.
Ang materyal na punto ay isang katawan na ang laki at hugis ay maaaring mapabayaan sa konteksto ng problemang ito.
Mga seksyon ng klasikal na mekanika
Ang mekanika ay binubuo ng ilang mga seksyon
- Kinematics
- Dynamics
- Statics
Kinematics mula sa pisikal na pananaw, eksaktong pinag-aaralan kung paano gumagalaw ang katawan. Sa madaling salita, ang seksyong ito ay tumatalakay sa mga quantitative na katangian ng paggalaw. Maghanap ng bilis, landas - karaniwang mga gawain ng kinematics
Dynamics nalulutas ang tanong kung bakit ito gumagalaw sa paraang ginagawa nito. Iyon ay, isinasaalang-alang nito ang mga puwersang kumikilos sa katawan.
Statics pinag-aaralan ang ekwilibriyo ng mga katawan sa ilalim ng pagkilos ng mga puwersa, iyon ay, sinasagot nito ang tanong: bakit hindi ito bumagsak?
Mga limitasyon ng kakayahang magamit ng mga klasikal na mekanika
Ang mga klasikal na mekanika ay hindi na inaangkin na isang agham na nagpapaliwanag ng lahat (sa simula ng huling siglo, ang lahat ay ganap na naiiba), at may malinaw na saklaw ng kakayahang magamit. Sa pangkalahatan, ang mga batas ng klasikal na mekanika ay may bisa para sa mundong pamilyar sa atin sa mga tuntunin ng laki (macroworld). Tumigil sila sa paggawa sa kaso ng mundo ng mga particle, kapag ang klasikal na mekanika ay pinalitan ng quantum mechanics. Gayundin, ang mga klasikal na mekanika ay hindi naaangkop sa mga kaso kung saan ang paggalaw ng mga katawan ay nangyayari sa bilis na malapit sa bilis ng liwanag. Sa ganitong mga kaso, ang relativistic effect ay nagiging binibigkas. Sa halos pagsasalita, sa loob ng balangkas ng quantum at relativistic mechanics - classical mechanics, ito ay isang espesyal na kaso kapag ang mga sukat ng katawan ay malaki at ang bilis ay maliit.

Sa pangkalahatan, ang mga quantum at relativistic na epekto ay hindi nawawala; nagaganap din ang mga ito sa panahon ng karaniwang paggalaw ng mga macroscopic na katawan sa bilis na mas mababa kaysa sa bilis ng liwanag. Ang isa pang bagay ay ang pagkilos ng mga epektong ito ay napakaliit na hindi ito lalampas sa pinakatumpak na mga sukat. Ang mga klasikal na mekanika ay hindi mawawala ang pangunahing kahalagahan nito.
Patuloy nating pag-aaralan ang mga pisikal na pundasyon ng mekanika sa mga artikulo sa hinaharap. Para sa isang mas mahusay na pag-unawa sa mekanika, maaari kang palaging sumangguni sa aming mga may-akda, na indibidwal na nagbibigay liwanag sa madilim na lugar ng pinakamahirap na gawain.
 Ang UCBrowser para sa PC ay isang karapat-dapat na katunggali para sa Google Chrome o hindi Uc browser fast mode
Ang UCBrowser para sa PC ay isang karapat-dapat na katunggali para sa Google Chrome o hindi Uc browser fast mode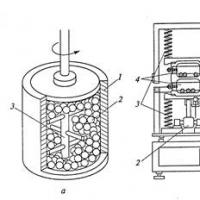 Mga pangunahing teknolohiya para sa pagkuha ng mga nanomaterial
Mga pangunahing teknolohiya para sa pagkuha ng mga nanomaterial Paano sabihin ang oras sa Ingles?
Paano sabihin ang oras sa Ingles? Pagtatanghal ng analytical na ulat ng guro ng kasaysayan Pakikilahok sa mga komisyon ng dalubhasa
Pagtatanghal ng analytical na ulat ng guro ng kasaysayan Pakikilahok sa mga komisyon ng dalubhasa Pagtatanghal ng analytical na ulat ng guro ng kasaysayan
Pagtatanghal ng analytical na ulat ng guro ng kasaysayan Pagtatanghal sa paksang "atherosclerosis"
Pagtatanghal sa paksang "atherosclerosis" Kasaysayan ng mga sistema ng numero
Kasaysayan ng mga sistema ng numero